Rainbow Electronics MAX6964 User Manual
Page 9
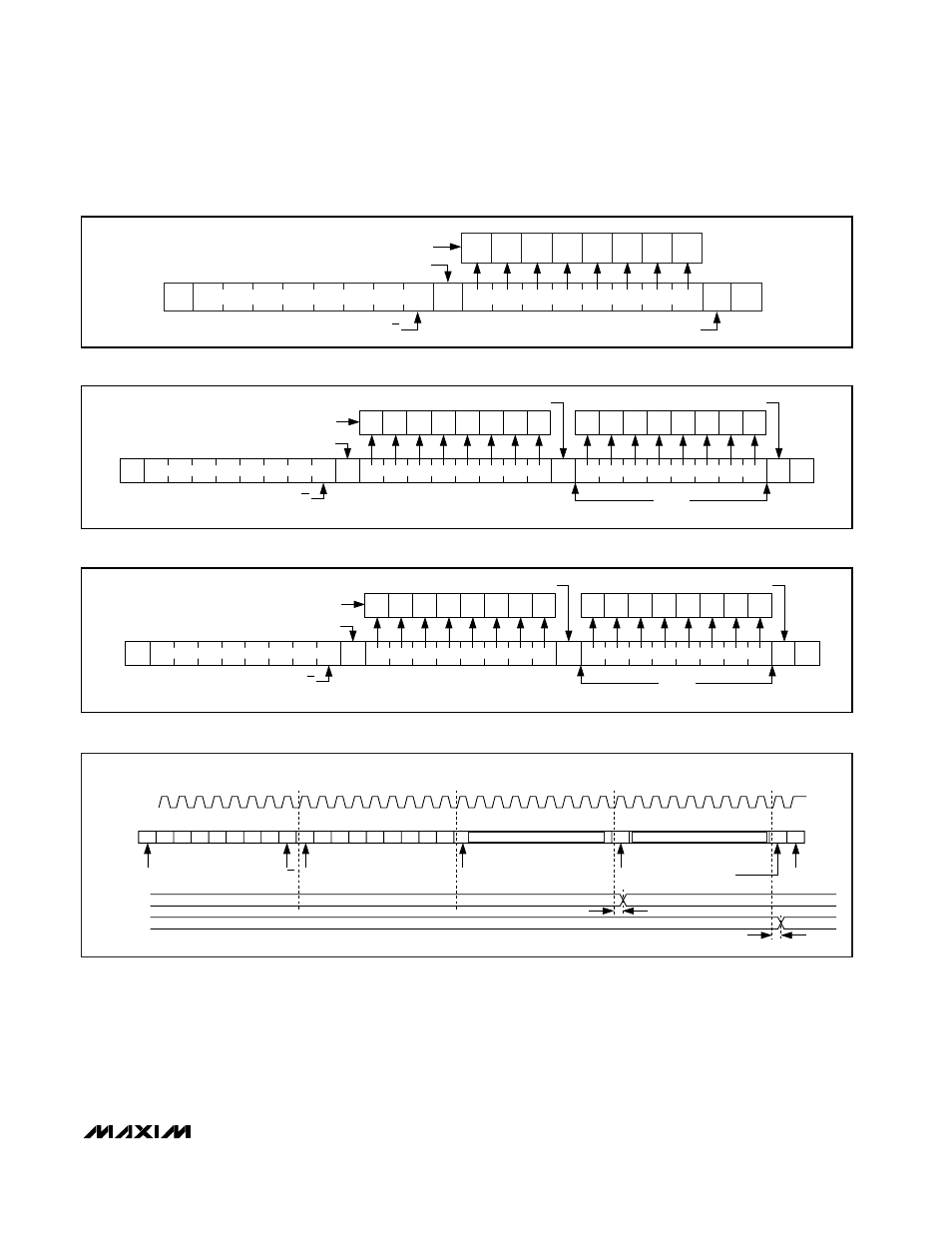
If multiple data bytes are transmitted before a STOP con-
dition is detected, these bytes are generally stored in
subsequent MAX6964 internal registers because the
command byte address autoincrements (
Table 2
). A
diagram of a write to the output ports registers (blink
phase 0 registers or blink phase 1 registers) is given in
Figure 10
.
Message Format for Reading
The MAX6964 is read using the MAX6964’s internally
stored command byte as an address pointer the same
way the stored command byte is used as an address
pointer for a write. The pointer autoincrements after
each data byte is read using the same rules as for a
write (
Table 2
). Thus, a read is initiated by first configur-
MAX6964
17-Output LED Driver/GPO
with Intensity Control
_______________________________________________________________________________________
9
Figure 8. Command and Single Data Byte Received
S
A
A
A
P
0
SLAVE ADDRESS
COMMAND BYTE
DATA BYTE
1
BYTE
AUTOINCREMENT MEMORY ADDRESS
D15 D14 D13 D12 D11 D10
D9
D8
D1
D0
D3
D2
D5
D4
D7
D6
ACKNOWLEDGE FROM MAX
6964
ACKNOWLEDGE FROM MAX
6964
ACKNOWLEDGE FROM MAX
6964
HOW COMMAND BYTE AND DATA BYTE MAP INTO
MAX
6964
's REGISTERS
R/W
Figure 9. n Data Bytes Received
S
A
A
A
P
0
SLAVE ADDRESS
COMMAND BYTE
DATA BYTE
N
BYTE
AUTOINCREMENT MEMORY ADDRESS
D15 D14 D13 D12 D11 D10
D9
D8
D1
D0
D3
D2
D5
D4
D7
D6
ACKNOWLEDGE FROM MAX
6964
ACKNOWLEDGE FROM MAX
6964
ACKNOWLEDGE FROM MAX
6964
HOW COMMAND BYTE AND DATA BYTE MAP INTO
MAX
6964
's REGISTERS
R/W
Figure 7. Command Byte Received
S
A
A
P
0
SLAVE ADDRESS
COMMAND BYTE
ACKNOWLEDGE FROM MAX6964
D15
D14
D13
D12
D11
D10
D9
D8
COMMAND BYTE IS STORED ON RECEIPT OF
STOP CONDITION
ACKNOWLEDGE FROM MAX6964
R/W
Figure 10. Write Timing Diagram
SLAVE ADDRESS
1
2
3
4
5
6
7
8
9
S A6 A5 A4 A3 A2 A1 A0
0
A
0
0
0
0
0
0
0
COMMAND BYTE
1
A
A
A
P
START CONDITION
ACKNOWLEDGE FROM SLAVE
ACKNOWLEDGE FROM SLAVE
ACKNOWLEDGE FROM SLAVE
STOP
CONDITION
O7–O0
O15– O8
DATA1 VALID
DATA2 VALID
t
DV
t
DV
SCL
SDA
WRITE TO OUTPUT PORTS REGISTERS (BLINK PHASE 0 REGISTERS/BLINK PHASE 1 REGISTERS)
R/W
MSB
LSB
DATA1
MSB
LSB
DATA2