Table 7. serial-interface header – Rainbow Electronics MAX6973 User Manual
Page 17
through the cascaded devices. When LOADI is low, the
MAX6972/MAX6973 continuously monitor DIN for
reception of the SYNC pattern (see the Header
Segment section).
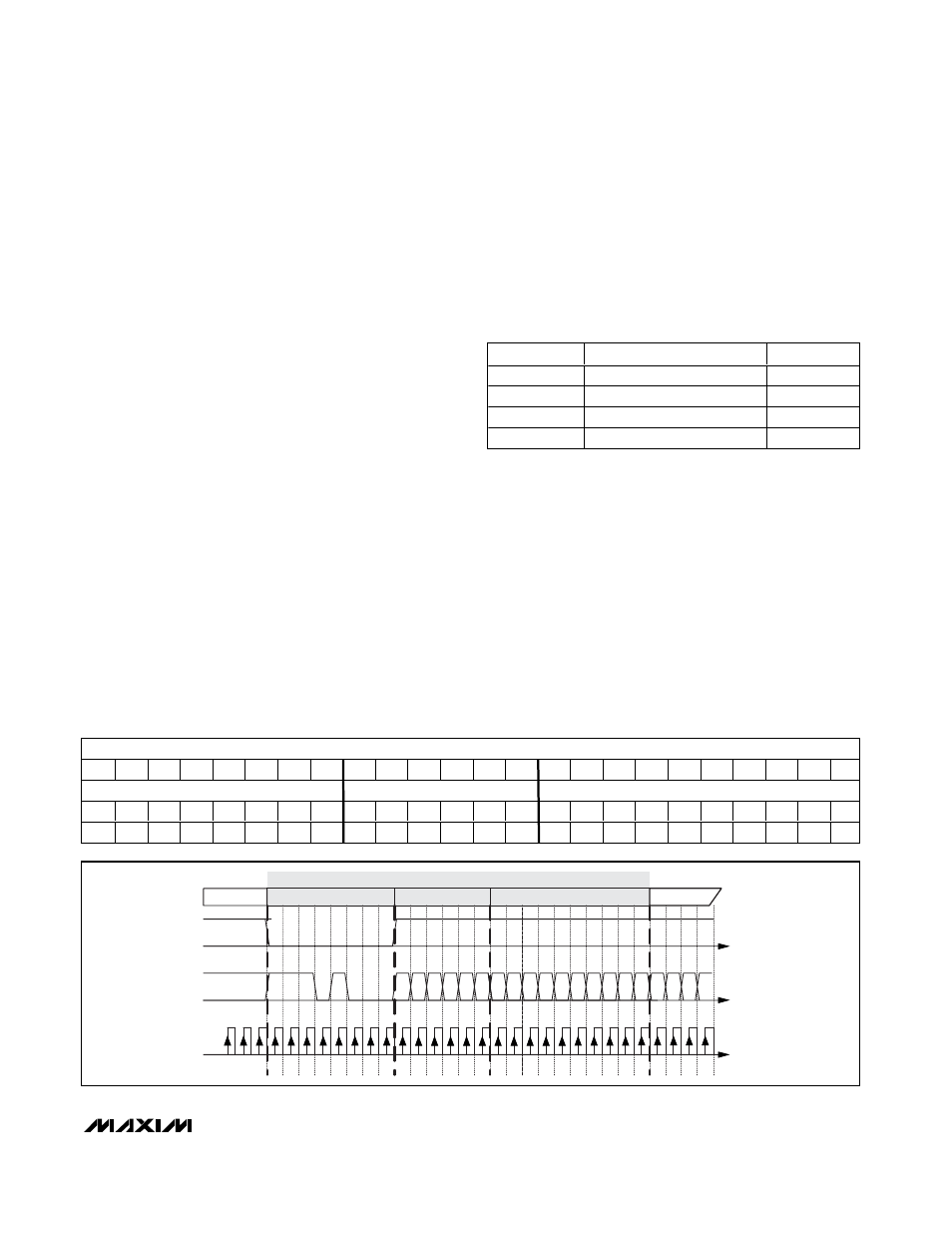
Header Segment
The 24-bit header segment consists of an 8-bit fixed
synchronization pattern (SYNC), a 6-bit command pat-
tern (CMD), and a 10-bit counter (CNTR) segment (see
Table 7). LOADI must change from low to high within
plus or minus one clock cycle of the first command bit.
When the SYNC bit pattern 0xE8 is recognized, LOADI
is monitored for the rising edge, allowing the device to
internally synchronize LOADI to CLKI. The six command
bits, CMD[5:0], consist of bits C1 and C0 repeated
three times. The four commands used by the MAX6972/
MAX6973 are defined by the two bits, C1 and C0.
The counter segment is incremented by one for each
cascaded device with an internal fault detected. Use the
counter segment to collect fault data across the cas-
caded chain.
HDR[23:0]
Complete 24-bit header segment.
SYNC[7:0]
Synchronization bit pattern 0xE8 is recognized by the
MAX6972/MAX6973 during intervals when LOADI is low.
The SYNC bit pattern, followed by the rising edge of
LOADI, internally synchronizes the timing relationship
between CLKI and DIN with the LOADI signal. The
synchronization pattern must be 0xE8.
CMD[5:0]
Send command bits C1 and C0 three times in succes-
sion. The command bits define how many data bits are
received and where the data is loaded. The four com-
mands are:
CNTR[9:0]
This is the counter for open LED or overtemperature fault
conditions. The host sends the header segment with the
counter value set to zero. The counter value is incre-
mented one count by each device that detects a fault
condition in the cascaded chain. The accumulated count
value returns to the host from the last device in the cas-
cade chain. The command determines which fault type
is incremented to the counter (see LED Open-Circuit and
Overtemperature Detection Counter section):
CMD[1:0] = X0
Overtemperature faults counted
CMD[1:0] = X1
Open LED faults counted
MAX6972/MAX6973
16-Output PWM LED Drivers
for Message Boards
______________________________________________________________________________________
17
HDR
23
22
21
20
19
18
17
16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
SYNC
CMD
CNTR
7
6
5
4
3
2
1
0
1
0
1
0
1
0
9
8
7
6
5
4
3
2
1
0
1
1
1
0
1
0
0
0
C1
C0
C1
C0
C1
C0
b9
b8
b7
b6
b5
b4
b3
b2
b1
b0
Table 7. Serial-Interface Header
C1:C0
COMMAND
CMD[5:0]
00
Load individual PWM
000000
01
Load CALDAC
010101
10
Load global-intensity PDM
101010
11
Load configuration
111111
HEADER
COUNTER
CLKI
COMMAND
1
1
1
0
1
0
0
0
SYNC
LOADI
1
2
3
4
5
6
7
8
9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28
DIN
1
0
(CONTINUOUS)
C1 C0 C1 C0 C1 C0
b9 b8 b7 b6 b5 b4 b3 b2
DATA
b1 b0
Figure 7. Header-Segment Timing