Texas Instruments TCM4300 User Manual
Page 29
3–6
3.6
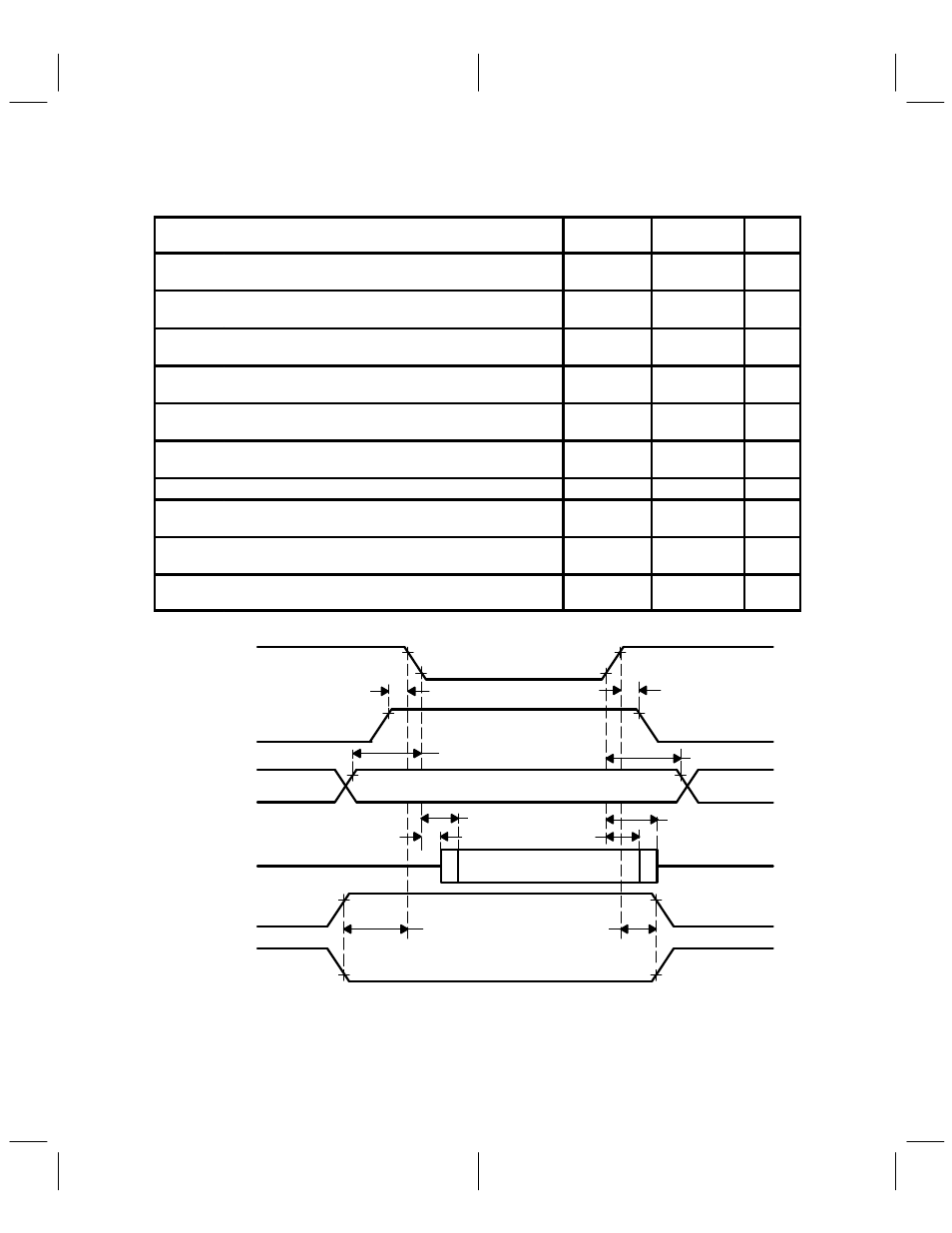
TCM4300 to Microcontroller Interface Timing Requirements (Motorola
16-Bit Read Cycle) (see Figure 3–6 and Note 4)
PARAMETER
ALTERNATE
SYMBOL
MIN
MAX
UNIT
tsu(R/W)
Setup time, read/write MCRW stable before falling edge of
strobe MCDS
TRW(SU)
0
ns
th(R/W)
Hold time, read/write MCRW stable after rising edge of
strobe MCDS
TRW(HO)
10
ns
tsu(RA)
Setup time, read address MCA stable before falling edge of
strobe MCDS
TRA(SU)
0
ns
th(RA)
Hold time, read address MCA stable after rising edge of
strobe MCDS
TRA(HO)
10
ns
ten(RD)
Enable time, read data on falling edge of strobe MCDS to
TCM4300 driving data bus MCD
TRD(EN)
10
ns
tv(RD)
Valid time, read data on falling edge of strobe MCDS to
valid data MCD
TRD(DV)
50
ns
tinv
Data (MCD) invalid after rising edge of strobe MCDS
TRD(INV)
10
ns
tdis(RD)
Disable time, read data. TCM4300 releases MCD data bus
after rising edge of strobe MCDS
TRD(DIS)
28
ns
th(CS)
Hold time, chip select MCCSH and MCCSL stable before
falling edge of strobe MCDS
TCS(HO)
0
ns
tsu(CS)
Setup time, chip select stable MCCSH and MCCSL before
rising edge of strobe MCDS
TCS(SU)
0
ns
NOTE 4: Timings are based upon Motorola 68HC000 (16.67 MHz) and Motorola 68302 (16 MHz).
MCA0–MCA4
MCD0–MCD7
MCDS
(see Note A)
MCRW
ПП
ПП
ПП
ПП
tsu(RA)
10%
90%
90%
10%
90%
90%
tsu(R / W)
th(RA)
tv(RD)
ten(RD)
tdis(RD)
tinv
tsu(CS)
th(CS)
MCCSH
MCCSL
90%
90%
10%
10%
NOTE A: Chip selection is defined as both MCCS and MCDS active.
th(R / W)
Figure 3–6. Microcontroller Interface Timing Requirements
(Motorola 16-Bit Read Cycle, MTS [1:0] = 10)