Gps source, Dgps source, Restart gps – Navman 5380 User Manual
Page 43: 3 setup > gps static navigation, Speed and course filter
TRACKER 5380 Installation and Operation Manual
43
NAVMAN
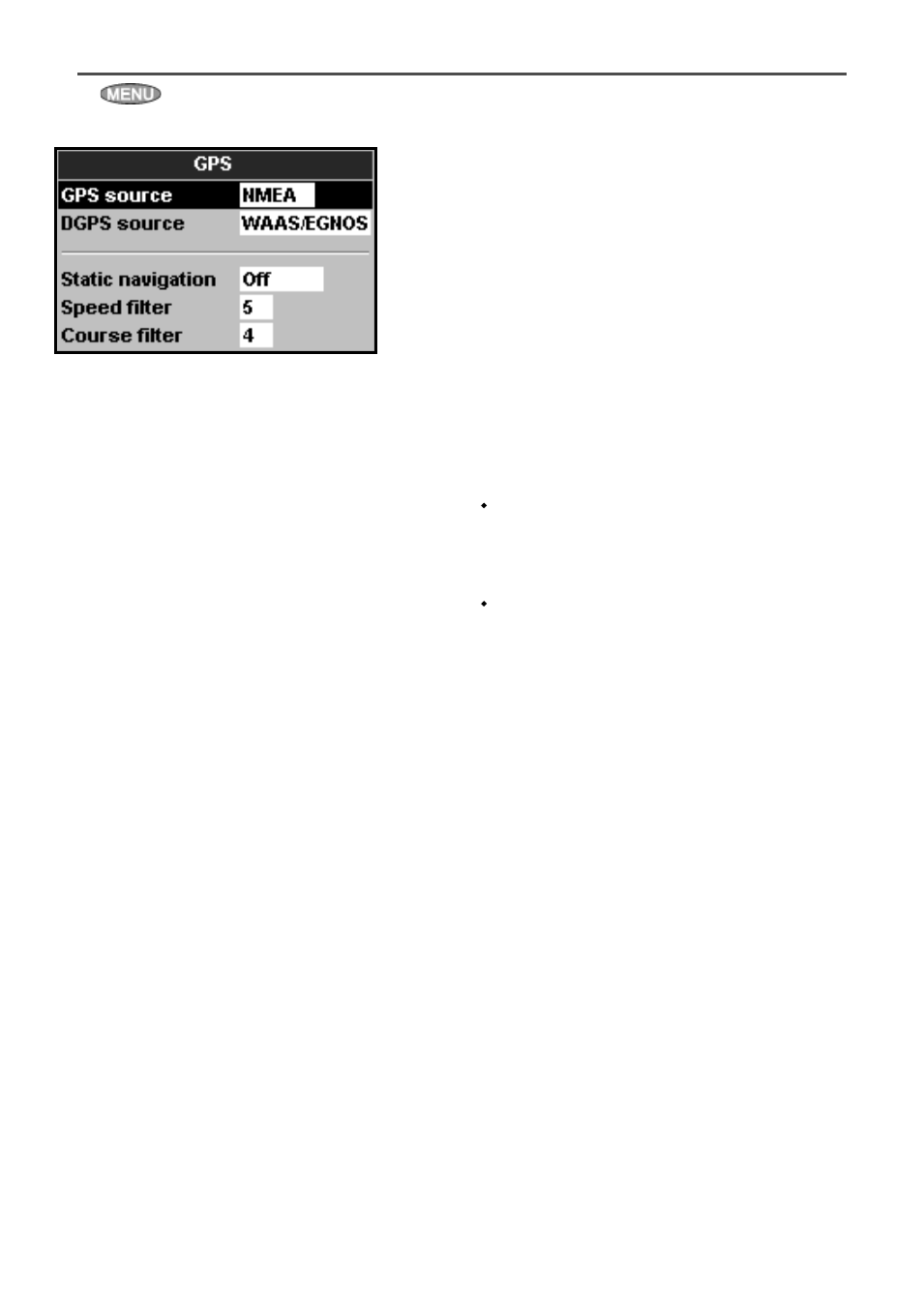
Press
once or more until the Setup
menu is displayed, then select
GPS:
GPS Source
•
Internal:
Use the internal GPS antenna
(TRACKER 5380i) or the external GPS
antenna supplied (TRACKER 5380) (see
section 15-5).
•
NMEA:
Use an external GPS or DGPS source
connected via NMEA (see section 15-9).
•
NavBus:
Use an external GPS or DGPS
source connected via NavBus (see section
15-8).
DGPS Source
Enables or disables the satellite based DGPS
correction (see section 7). The options are
None
or
WAAS/EGNOS
. Do not enable
WAAS/EGNOS outside their coverage areas
or the accuracy of the position might be
degraded.
WAAS covers all of the USA and most of
Canada. To use WAAS, the GPS antenna must
have a clear view of the sky towards the
equator. EGNOS will cover most of Western
Europe when it becomes operational.
Restart GPS
Restarts the internal GPS receiver for servicing
or troubleshooting. The GPS receiver takes
up to three minutes to restart. The satellite
display shows the status of the GPS receiver
(see section 7). Restart the GPS if the receiver
has not been used for some time and is taking a
long time to get a GPS fix.
14-3 Setup > GPS
Static Navigation
When the boat stops or moves very slowly,
the calculated GPS speed and course become
erratic. Static navigation is a number, and the
options are:
•
0.01
to
99.9:
If the boat speed is slower
than this, the speed is displayed as zero and
the course stays unchanged.
•
0(Off):
The calculated speed and course
are always used.
Speed and Course Filter
Waves and wind cause the boat speed and
course to fluctuate slightly. To give stable
readings, the TRACKER calculates these
values by taking several measurements and
averaging them.
A lower value averages measurements
over a shorter period of time. This gives
the most accurate value but has the most
fluctuations.
A higher value averages measurements
over a longer period of time. This gives the
most stable value but will ignore some true
speed changes.
Set the Speed and Course filters to the lowest
values which give stable readings. The range of
each filter is 1 to 60 seconds or Off (0).