37 ship’s position – Furuno FAR-2107(-BB) User Manual
Page 94
1. RADAR OPERATION
1-72
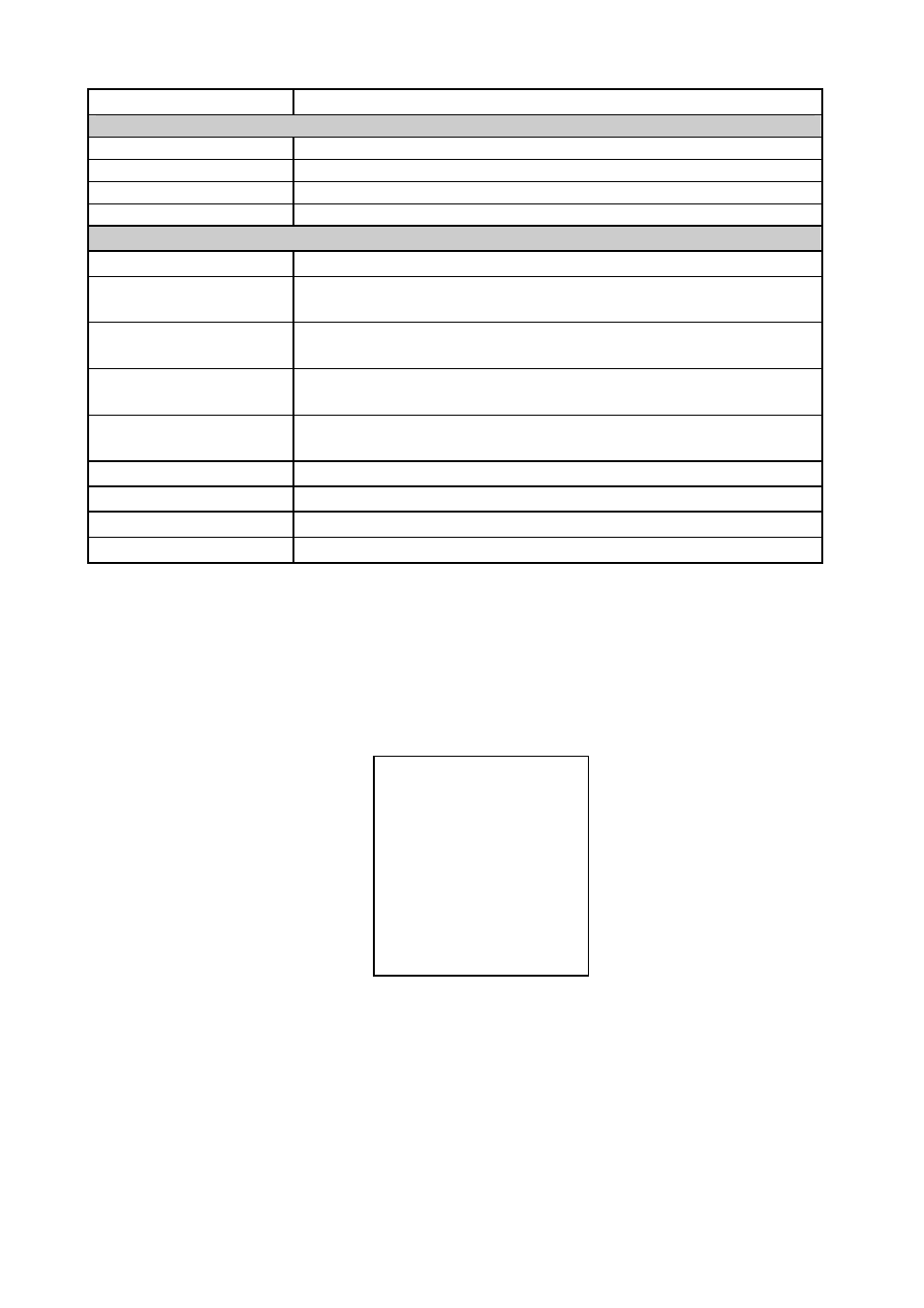
[OS
POSN
MENU]
1 NAV AID
GPS1/GPS2/
DEAD
RECKONING/
LAN
2 MANUAL L/L
00°00.00
N
000°00.00
W
3 SIO DATA LAN OUTPUT
OFF/ON
Item Description
[OPERATION] (con't from previous page)
OWN TRK ALL ERASE
Erases all own ship’s tracks.
TGT TRK ALL ERASE
Erases all other ship’s tracks.
MARK ALL ERASE
Erases all marks.
DROP MARK
Inscribe a drop mark.
[PICTURE]
PICTURE1 – PICTURE4
Actuates settings of user-programmed setup.
NEAR
Optimum setting for short range detection using a range scale of 3
nm or less on calm seas
FAR
Optimum setting for long range detection using a range scale of 6
nm or larger
NEAR BUOY
Optimum setting for detecting navigation buoys, small vessels and
other small surface objects at close range
FAR BUOY
Optimum setting for detecting navigation buoys, small vessels and
other small surface objects at long range
ROUGH SEA
Optimum setting for rough weather or heavy rain
SHIP
Optimum setting for detecting vessels
HARBOR
Optimum setting for harbor navigation
COAST
Optimum setting for coastal navigation
1.37 Ship’s
Position
Select the source of ship’s position data as follows:
1. Right-click the OSN POSN box at the top right corner of the screen to show
the OS POSN menu.
OS POSN menu
2. Select 1 NAV AID.
3. Select GPS1, GPS2 or DEAD RECKONING as appropriate.
GPS1: GPS navigator connected to nav port
GPS2: GPS navigator connected to SPEED LOG port or TRACK CONTROL
port.