4 operational mode – ao8, 5 speed command limits – ao10, ao11, 6 motor rated current – ao12 – Yaskawa GPD505 User Manual
Page 14: 4 operational mode – ao8 4.1.5, Speed command limits – ao10, ao11, 6 motor, Rated, Current – ao12
TM4028
7/12/2001
14
Object
ID
Object Name
GPD505
Parameter
GPD506
Parameter
Units Default
Min
Max
AO6
Stall Prevention Level – Run
n072
n074
%
Note 1
30 200
AO7
Stall Prevention Level –
Accel
n071 n073 %
Note 1
30 200
Notes
1. Value dependent on drive capacity. Refer to appropriate Technical Manual.
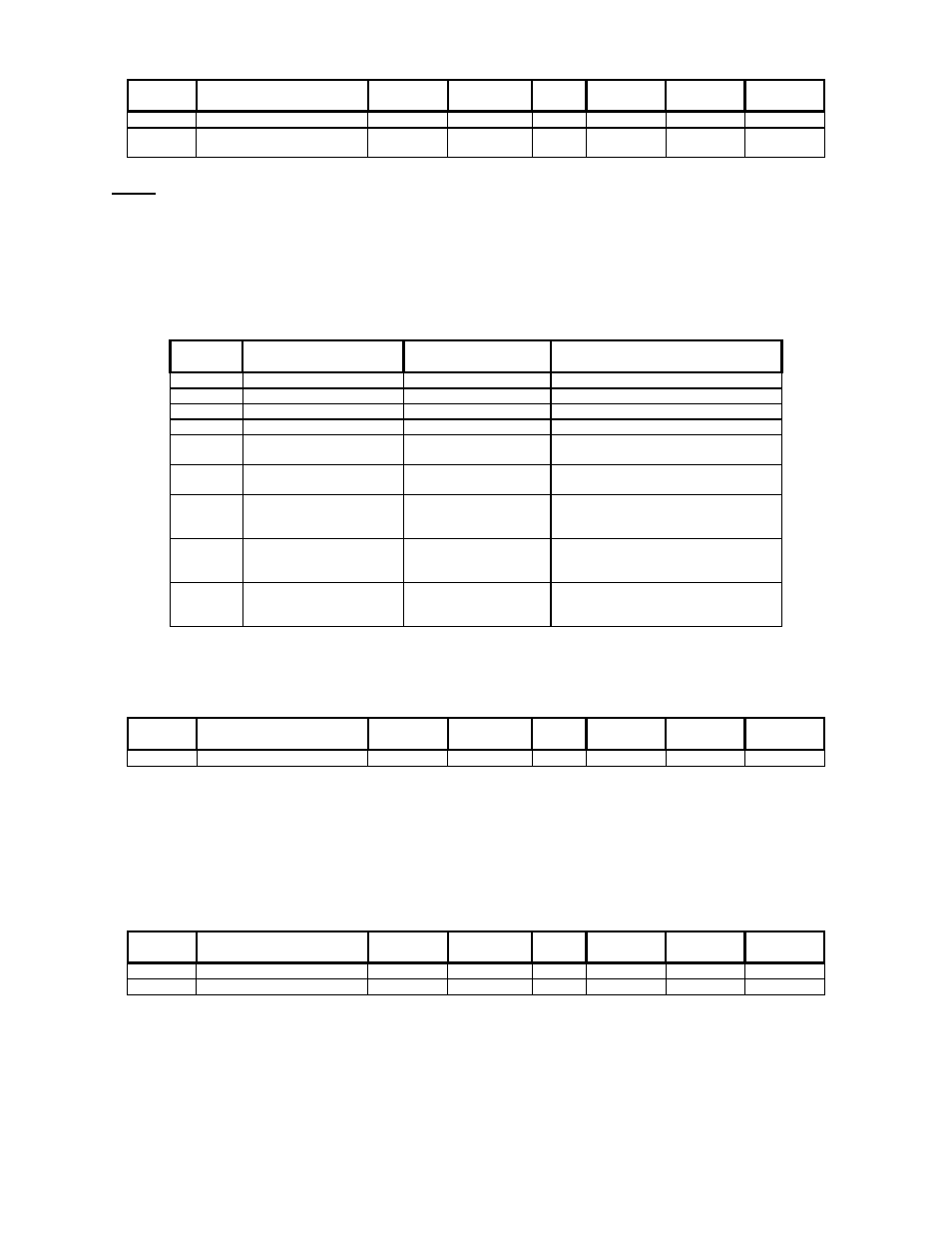
4.1.4 Operational Mode – AO8
This analog output defines the source for run and speed commands, as described below:
AO8 Run/Reverse
Command
Source
Speed Command
Source
Remarks
0
Digital Operator
Digital Operator
AO1, BO1, BO2 have no affect.
1
External Terminals
Digital Operator
AO1, BO1, BO2 have no affect.
2
Digital Operator
External Terminals
AO1, BO1, BO2 have no affect.
3
External Terminals
External Terminals
AO1, BO1, BO2 have no affect.
4
Digital Operator
Network
AO1 sets speed command.
BO1, BO2 have no affect
5
External Terminals
Network
AO1 sets speed command.
BO1, BO2 have no affect
6
Network
Network
AO1 sets speed command.
BO1 sets run command.
BO2 sets forward/reverse command.
7
Network
Digital Operator
AO1 has no affect.
BO1 sets run command.
BO2 sets forward/reverse command.
8
Network
External Terminals
AO1 has no affect.
BO1 sets run command.
BO2 sets forward/reverse command.
This object configures the drive as described below:
Object
ID
Object Name
GPD505
Parameter
GPD506
Parameter
Units Default
Min
Max
AO8
Operational Mode Select
n002
n002
-
3
0
8
4.1.5 Speed Command Limits – AO10, AO11
These analog outputs define the upper and lower speed command limits. Each value is specified as a
percentage of the maximum drive output frequency, defined by GPD505 parameter n012 or GPD506
parameter n011. These objects configure the drive as described below:
Object
ID
Object Name
GPD505
Parameter
GPD506
Parameter
Units Default
Min
Max
AO10
Freq Command Upper Limit
n030
n031
%
100
0
109
AO11
Freq Command Lower Limit
n031
n032
%
0
0
100
4.1.6 Motor Rated Current – AO12
This analog output defines the current rating of the motor, configuring the drive as described below: