Timer applications, Encoder applications, Encoder connections – Sensoray 425 User Manual
Page 12: Pin name function
Sensoray Model 425 Instruction Manual
Page 10
Counter Interrupts
Counter channels may be programmed to generate interrupt
service requests in response to captured events. A channel
asserts it’s interrupt request when two conditions are
simultaneously met: the Capture flag is set, and the channel
interrupt is enabled. The Control port is used to enable and
disable counter interrupts:
When servicing an interrupt request from the 425 board,
examine the Status port to determine which device (or
devices) requires service:
Timer Applications
A timer is often used to generate an interrupt request
upon expiration of a time interval. Such applications
will typically follow this sequence of events:
•
Preload an initial value into the counter. The initial value
equals the number of 3MHz cycles that will occur
during the desired time interval. For example, the value
3,000,000 will produce a 1 second interval.
•
Enable the counter interrupt and arm the event capture.
•
Timer rollover occurs, setting the Capture flag and
generating an interrupt request.
•
Host responds to the interrupt request by executing an
interrupt handler. By reading the Status register, the host
determines that the counter is requesting service. The
host disables the interrupt and disarms event capture,
then performs the appropriate application functions.
Encoder Applications
Encoders are frequently used in motion control systems
to track absolute position. In a typical system, each
control axis employs a limit switch in conjunction with
encoder index to recognize the axis reference position.
The motor seeks the reference position by “backing
up” until the limit switch activates.
A typical encoder application, with interrupts, follows
this sequence of events to seek a reference position:
•
“Reverse” motor until the limit switch activates, then stop
the motor. The limit switch could be easily connected to
a relay channel for interrupt-driven edge detection.
•
Arm the counter channel event capture and enable the
counter channel interrupt.
•
Start the motor in the “forward” direction.
•
Encoder index activates, simultaneously zeroing the
counter, setting the Capture flag, and generating an
interrupt request.
•
The host responds to the interrupt request by executing an
interrupt handler. By reading the Status register, the host
determines that the counter is requesting service. The
host disables the interrupt and disarms event capture,
then performs the appropriate application functions.
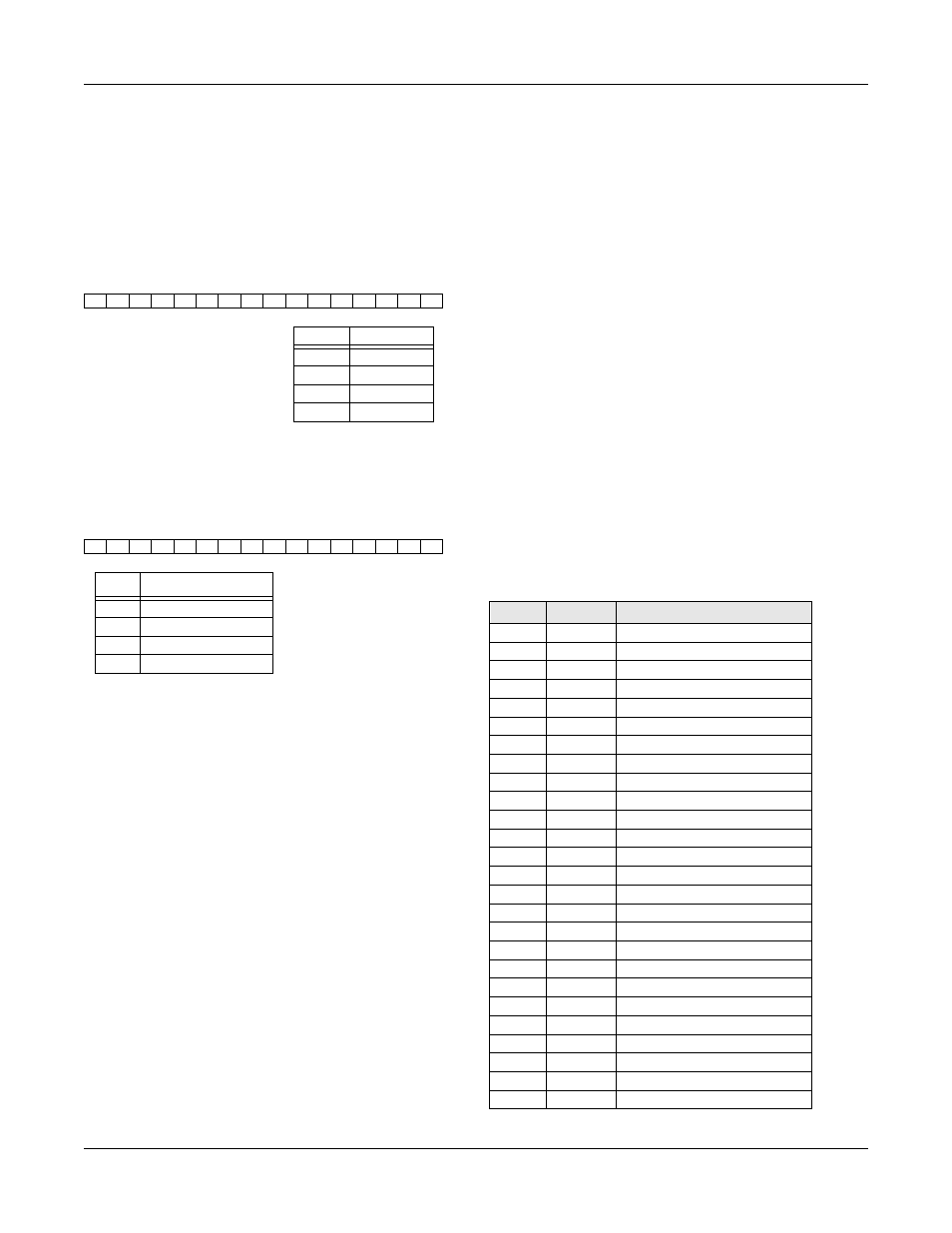
Encoder Connections
Connector J1 is used to make all electrical connections
to external encoders or other pulse sources:
Control Port (base + 16, write only) : Set Interrupt Enables
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
V
0
0
0
0
0
1
0
0
0
A1
A0
0
0
0
0
V=1 to enable interrupt,
V=0 to disable interrupt.
A
1
and A
0
specify which counter
channel is to be enabled/disabled:
A
1
A
0
Encoder
00
Channel 0
01
Channel 1
10
Channel 2
11
Not Valid
Status Port (base + 22, read only) : Determine IRQ Source
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
x
x
x
x
RQR RQ2 RQ1 RQ0
x
x
x
x
x
x
x
x
Bit
Service Requestor
RQR
Relay Channel(s)
RQ2
Counter Channel 2
RQ1
Counter Channel 1
RQ0
Counter Channel 0
Pin
Name
Function
1
-A
0
Channel 0 phase A input (-)
2
+A
0
Channel 0 phase A input (+)
3
GND
GND
4
-B
0
Channel 0 phase B input (-)
5
+B
0
Channel 0 phase B input (+)
6
+5V
+5V
7
-X
0
Channel 0 index input (-)
8
+X
0
Channel 0 index input (+)
9
GND
GND
10
-A
1
Channel 1 phase A input (-)
11
+A
1
Channel 1 phase A input (+)
12
+5V
+5V
13
-B
1
Channel 1 phase B input (-)
14
+B
1
Channel 1 phase B input (+)
15
GND
GND
16
-X
1
Channel 1 index input (-)
17
+X
1
Channel 1 index input (+)
18
+5v
+5v
19
-A
2
Channel 2 phase A input (-)
20
+A
2
Channel 2 phase A input (+)
21
GND
GND
22
-B
2
Channel 2 phase B input (-)
23
+B
2
Channel 2 phase B input (+)
24
+5V
+5V
25
-X
2
Channel 2 index input (-)
26
+X
2
Channel 2 index input (+)