8 display function – Adept T2 Pendant User Manual
Page 32
Operation
32
Adept T2 Pendant User’s Guide, Rev D
4.8
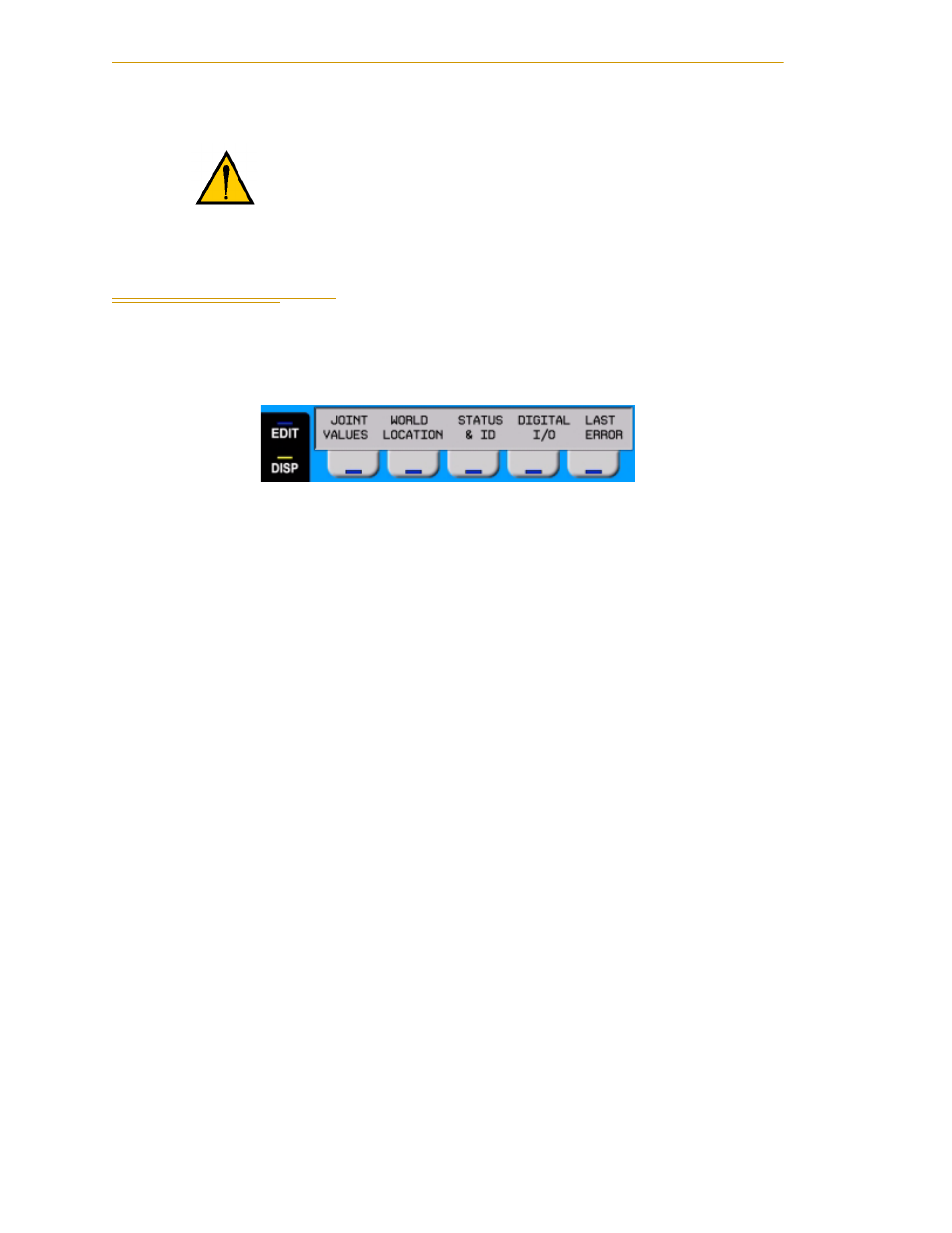
Display Function
The DISP (Display) function button allows the current joint values, the current World
location, the system status, the digital I/O status, or the last error message to be displayed
on the pendant display window.
Figure 4-7. DISPLAY Function Button
JOINT VALUES
When this button is pressed, the display shows:
J1 = x.xx
2 = x.xx
3 = x.xx
J4 = x.xx
5 = x.xx
6 = x.xx
These values represent the current joint positions of the robot or motion device. Values
will be shown only for the joints present on the robot or motion device. Rotational joint
values are expressed in degrees; translational joint values are expressed in millimeters.
WORLD LOCATION
When this button is pressed, the display shows:
X = xxx.xxmm
Y = xxx.xxmm
Z = xxx.xxmm
y = xxx.xx°
p = xxx.xx°
r = xxx.xx°
The values represent the current location of the robot or motion device in World
coordinates. See
for details on World coordinates.
STATUS & ID
When this button is pressed, the display shows:
Status
SOFTWARE
CNTRLR
ROBOT
ID
ID
ID
The Status button displays:
program.name
50
1
0
Program
Speed
Cycle
Left
WARNING:
Be extremely careful when changing location
values. When the robot moves to a modified location, it
could damage equipment in the workcell.