Md - motor disable, Me - motor enable, Mr - microstep resolution – Applied Motion 1240i User Manual
Page 20: Pc - power on current
SCL Software Manual
20
920-0010 rev B
9/26/07
Example:
You send
Drive sends
JS10.35
nothing
JS
JS=10.35
MD – Motor Disable
Disables motor (cuts current to zero).
ME – Motor Enable
Restores previous motor current.
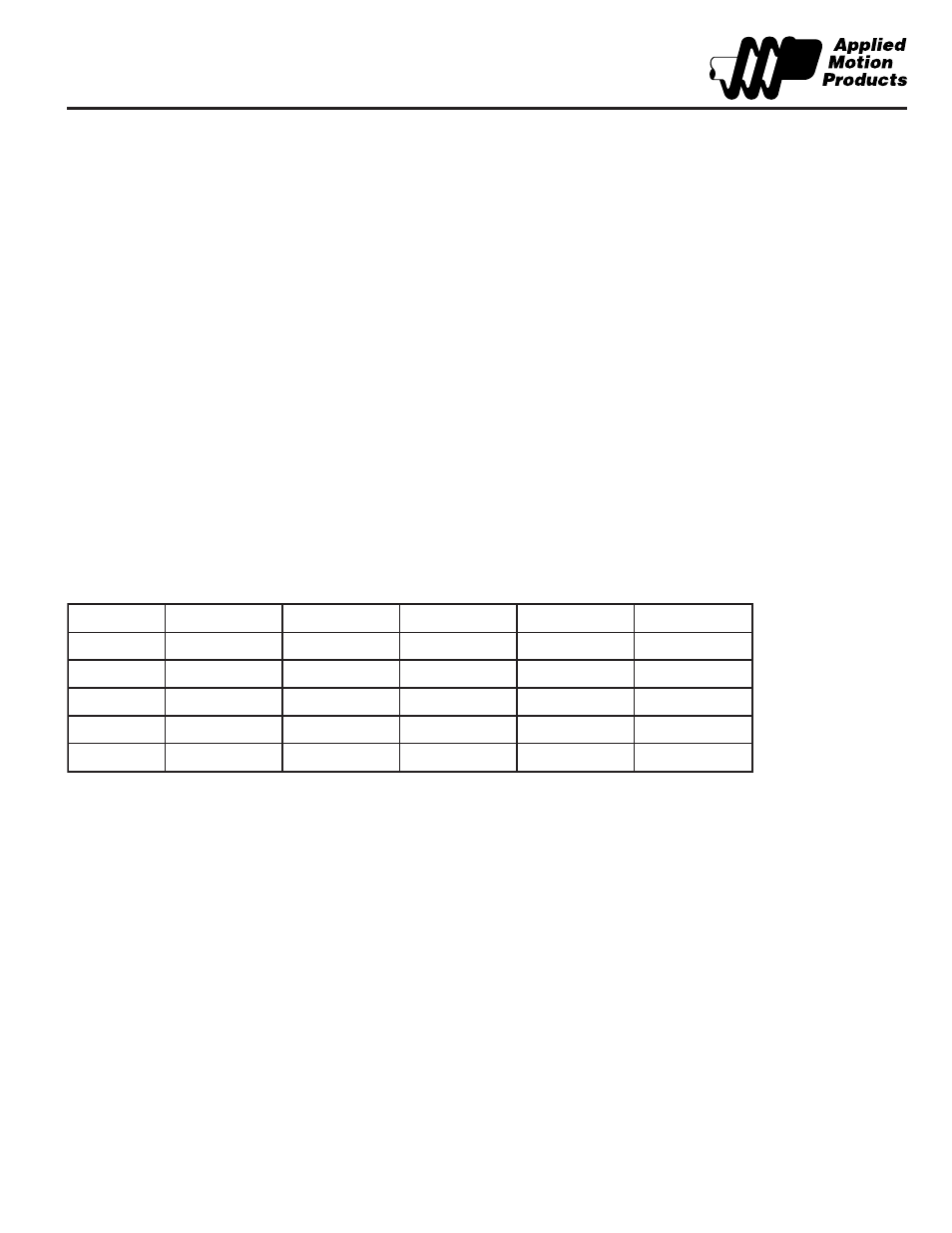
MR – Microstep Resolution
Sets, or requests microstep resolution. For a drive with built-in amplifier, like the Si5580, the range is 3
– 15, from the table below. The MR command should be used before setting the accel and decel rates
and speed, because a change in motor resolution will corrupt these settings. The MR command also
resets the step table, which moves the motor to the nearest pole position. The absolute position regis-
ter is not changed.
Example:
You send
Drive sends
Notes
MR8
nothing
sets drive to 20,000 steps/rev
MR
MR=8
e
d
o
C
R
M
v
e
r
/
s
p
e
t
S
e
d
o
C
R
M
v
e
r
/
s
p
e
t
S
e
d
o
C
R
M
v
e
r
/
s
p
e
t
S
3
0
0
0
2
8
0
0
0
0
2
3
1
0
0
0
6
3
4
0
0
0
5
9
0
0
6
1
2
4
1
0
0
0
0
5
5
0
0
0
0
1
0
1
0
0
0
5
2
5
1
0
0
8
0
5
6
0
0
8
2
1
1
1
0
0
4
5
2
7
0
0
0
8
1
2
1
0
0
6
5
2
The Si-100 is a special case. It is an indexer with pulse and direction outputs that can be connected to many
different drives. If you want speeds and acceleration rates to be accurate, you must set the Si-100 to match
the resolution of your drive. First, enter the steps/rev using the DI command. Then send the command “MR16”
to accept the contents of the DI register as the new motor resolution.
Example (a servo drive with 1024 line/4096 count encoder):
You send
Drive sends
Notes
DI4096
nothing
sets DI register to 4096
MR16
nothing
sets the motor resolution at 4096 steps/rev
If you have a servo drive like the BL7080i, the motor/encoder resolution can only be set using the
Quick
Tuner™ software. MR is permanently set to 16 on the BL7080i servo drive.
PC – Power on Current
Sets power on current in amps. Also changes present current.
Example:
You send
Drive sends
PC3.2
nothing