Ip - immediate position, Is - input status, Ja - jog acceleration – Applied Motion 1240i User Manual
Page 19: Jd - jog disable, Je - jog enable, Js - jog speed
SCL Software Manual
19
920-0010 rev B
9/26/07
Example:
You send
Drive sends
IL1
output 1 goes low immediately
IL2
output 2 goes low immediately
See also: IH, SO
IP – Immediate Position
Requests present absolute position, in hex. (Value is in hex because conversion to ascii of another
format would tax the CPU enough to interfere with a move in program. Application programs can
easily convert a hex value to integer.)
Example:
You send
Drive sends
Notes
IP
IP=00002710
abs position is 10,000 steps
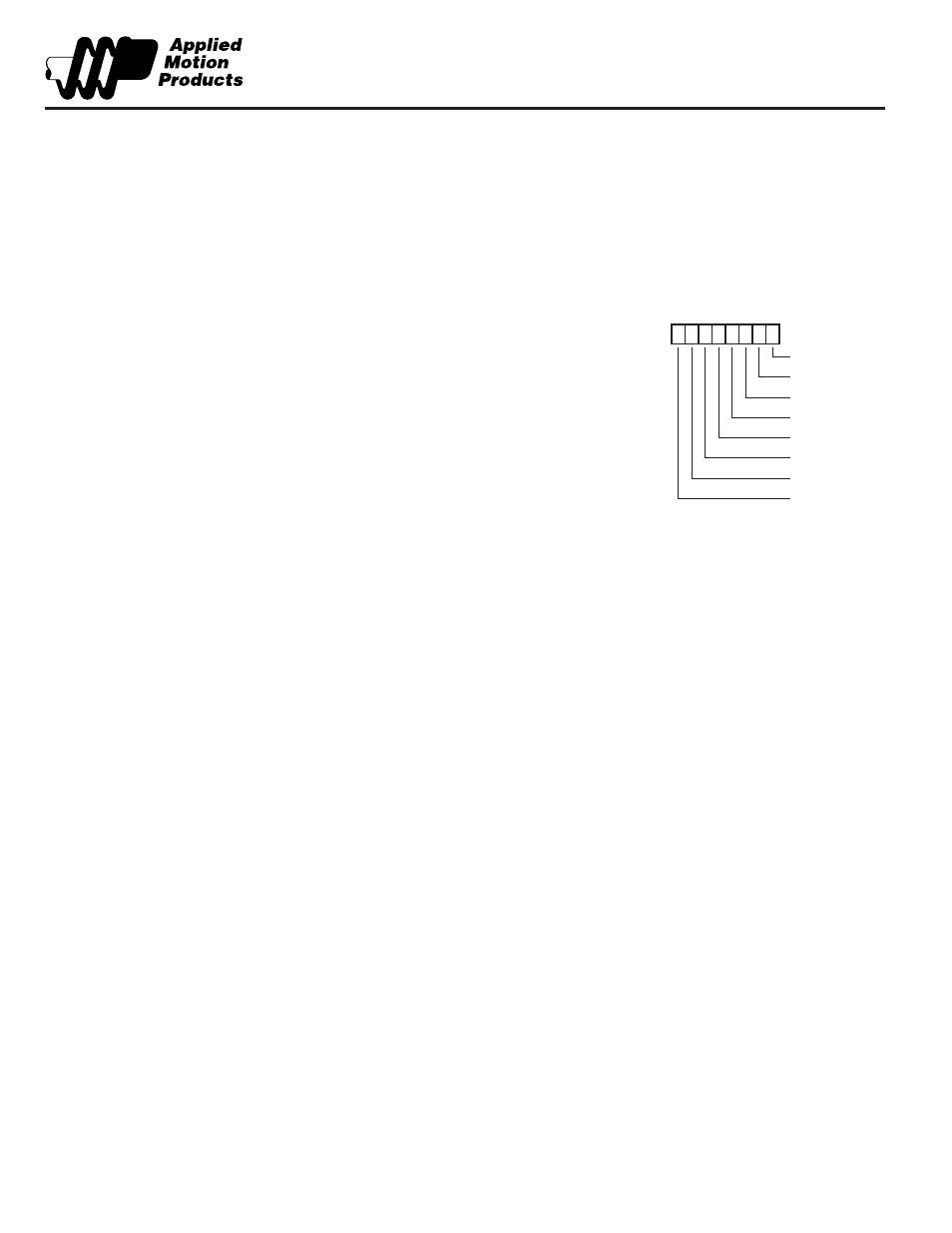
IS – Input Status
Requests immediate status of all 8 inputs.
Example:
You send
Drive sends
Notes
IS
IS=00000000
all 8 inputs are low (closed)
IS
IS=11111111
all 8 inputs are high (open)
IS
IS=00000001
input 1 is high
IS
IS=10000000
input 8 is high
JA – Jog Acceleration
Sets accel/decel rate for jog moves in rev/sec/sec. Sending JA with no number causes drive to re-
spond with present jog accel/decel rate. Range is 1 – 3000.
Affects: WI (jogging)
See also: JS
Example:
You send
Drive sends
JA100
nothing
JA
JA=100
JD – Jog Disable
Disables jog inputs (normally active during WI instructions)
JE – Jog Enable
Enables jog inputs (active during WI instructions)
JS – Jog Speed
Sets speed for jog moves in rev/sec. Sending JS with no number causes drive to respond with
present jog speed. Range is .025 – 50.
Affects: WI (jogging)
See also: JA
IS= 1 1 1 1 1 1 1 1
IN1
IN2
IN3
IN4
IN5(cw jog)
IN6(ccw jog)
IN7(cw limit)
IN8(ccw limit)