7 appendix c. dmu command quick reference, Appendix c. dmu command quick reference, Vg700m user’s manual – Moog Crossbow VG700MB Series User Manual
Page 31
VG700M User’s Manual
Doc.# 7430-0280-01
Rev. F
Page 25
7 Appendix C. DMU Command Quick Reference
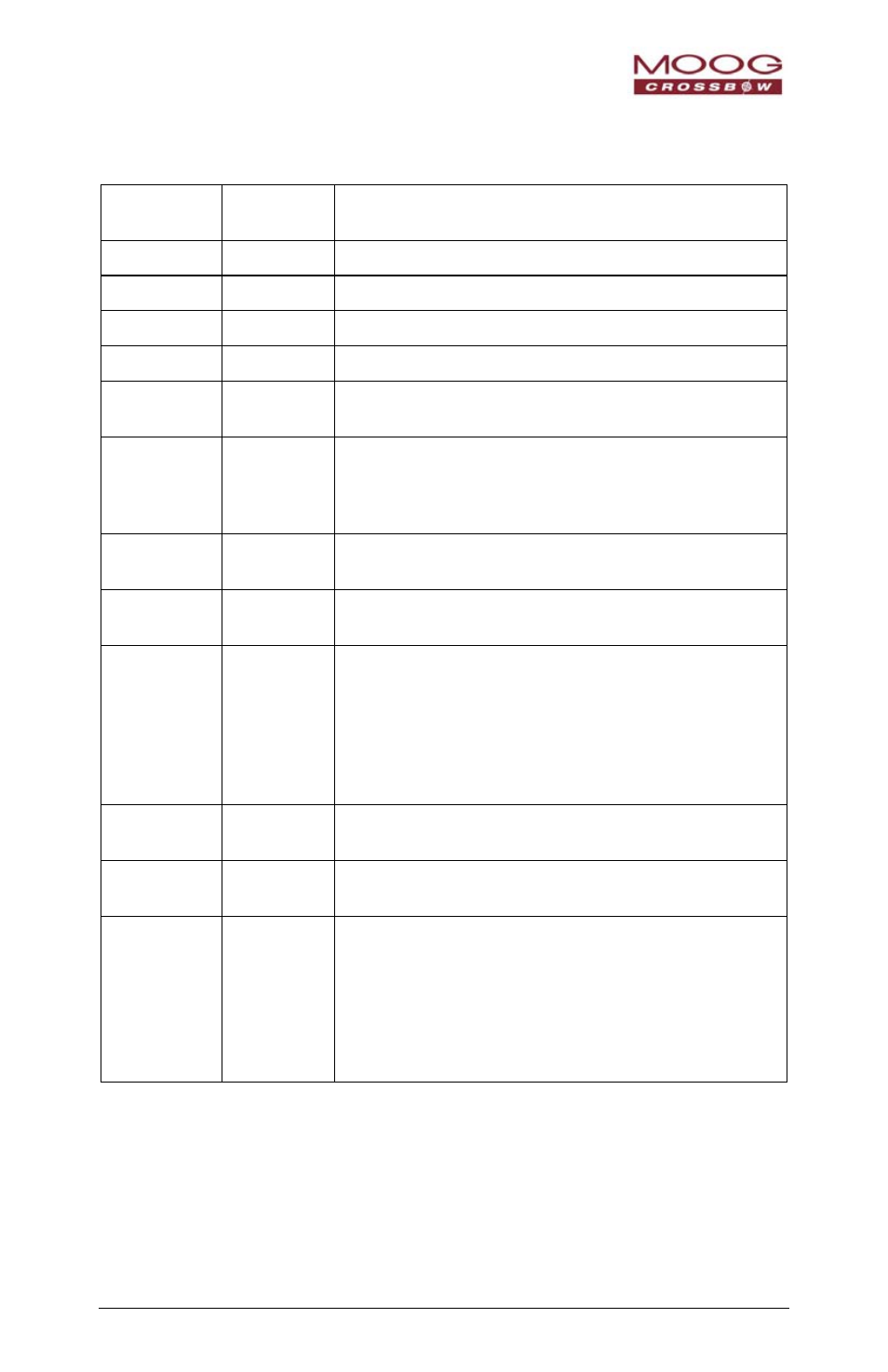
Command
(ASCII)
Response Description
R
H
Ping: Pings DMU to verify communications.
r
R
Change to Voltage Mode.
c
C
Change to Scaled Sensor Mode.
a
A
Change to Angle Mode (VG Mode).
P
None
Change to polled mode. Data packets sent when a G
is received by the DMU.
C
None
Change to continuous data transmit mode. Data
packets streamed continuously. Packet rate is
dependent on operating mode. Sending "G" stops
data transmission.
G Data
Packet
Get Data: Requests a packet of data from the DMU.
Data format depends on operating mode.
T <0-255>*
None
2-byte command sequence that changes the vertical
gyro erection rate.
z
Z
Calibrate and set zero bias for rate sensors by
averaging over time. The argument of the command
ignores and hence any single byte character can be
sent. Unit should be still during zeroing. However, if
are erased.
S ASCII
String
Query DMU serial number. Returns serial number as
32 bit binary number.
v ASCII
String
Query DMU version ID string. Returns ASCII string.
B
b
Built in test performed, result in BIT byte of next data
packet. Delay of 70ms occurs for this test.
The Gyro zeroing validity bit defaults to the high
condition upon power up or any restart of the system.
If the previous zeroing performed was successful, the
user may choose to ignore the gyro zeroing validity
bit.
*Note: argument of command is sent as a single hex byte, not as an ASCII
character.