Bit data description bit location – Moog Crossbow VG700MB Series User Manual
Page 19
VG700M User’s Manual
Doc.# 7430-0280-01
Rev. F
Page 13
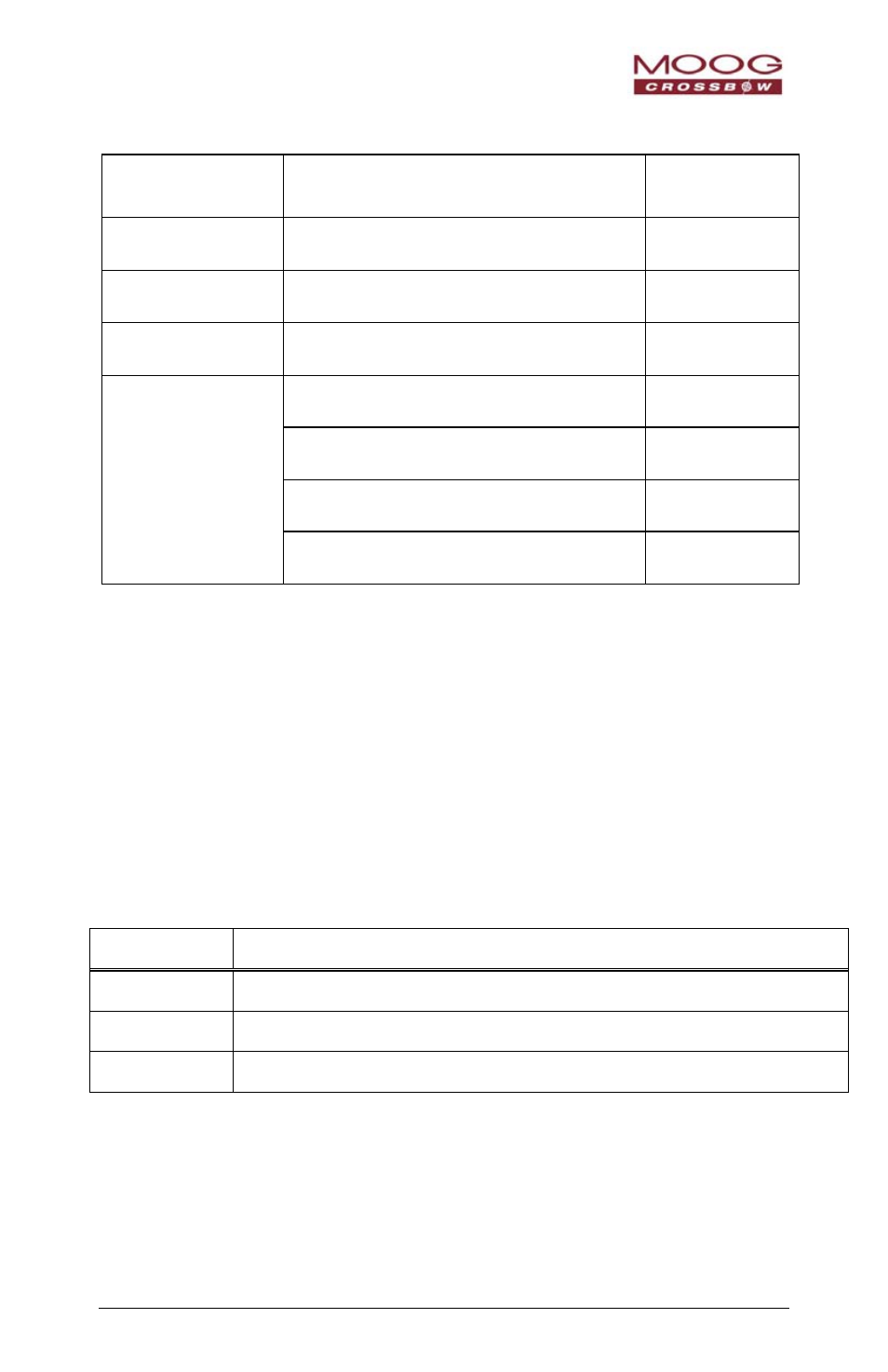
Table 2 Bit Message Definition (VG700MB-206 Only)
BIT Data
Description
Bit
Location
Accelerometer
Failure
Accelerometer outputs are incorrect
Bit 2
Gyro Zeroing
Validity
Gyro Zeroing invalid
Bit 4
Gyro Zeroing
Process
Gyro Zeroing in process
Bit 5
Not valid
Bits 6,7: 00
Pitch and Roll outputs computed
using only accelerometers
Bits 6,7: 10
Not used
Bits 6,7: 01
Algorithm
Validity Status
Full accuracy data using gyros and
accelerometers
Bits 6,7: 11
Notes:
1) The Algorithm Validity Status BIT is updated every transmitted serial
packet.
2) The Accelerometer Failure BIT is only updated after the BIT self-test is
executed.
3) The Gyro Zeroing Validity BIT defaults to the high condition upon
power up or any restart of the system. The Gyro Zeroing Validity BIT will
stay high signifying an invalid gyro zeroing result. Performing another
gyro zeroing can reset the BIT, so the gyro zeroing should be repeated until
this bit stays low. If the previous zeroing performed was successful, the
user may choose to ignore the Gyro Zeroing Validity BIT.
Examples:
BIT Byte
Interpretation
11000000
Pitch and roll at full accuracy; everything OK
01000000
Angles based on accelerometer only; everything OK
11010000
Pitch and roll at full accuracy; Gyro zeroing invalid; Accels OK.