Significance of parameter „m – Baumer N 142 User Manual
Page 19
N 142
www.baumer.com
19
Important: Only bits marked ‘X’ may be altered. The permanent values „1“ and „0“ must not be altered since
thereby a control token ( tokens < 20h) might be created what is not permitted in ASCII.
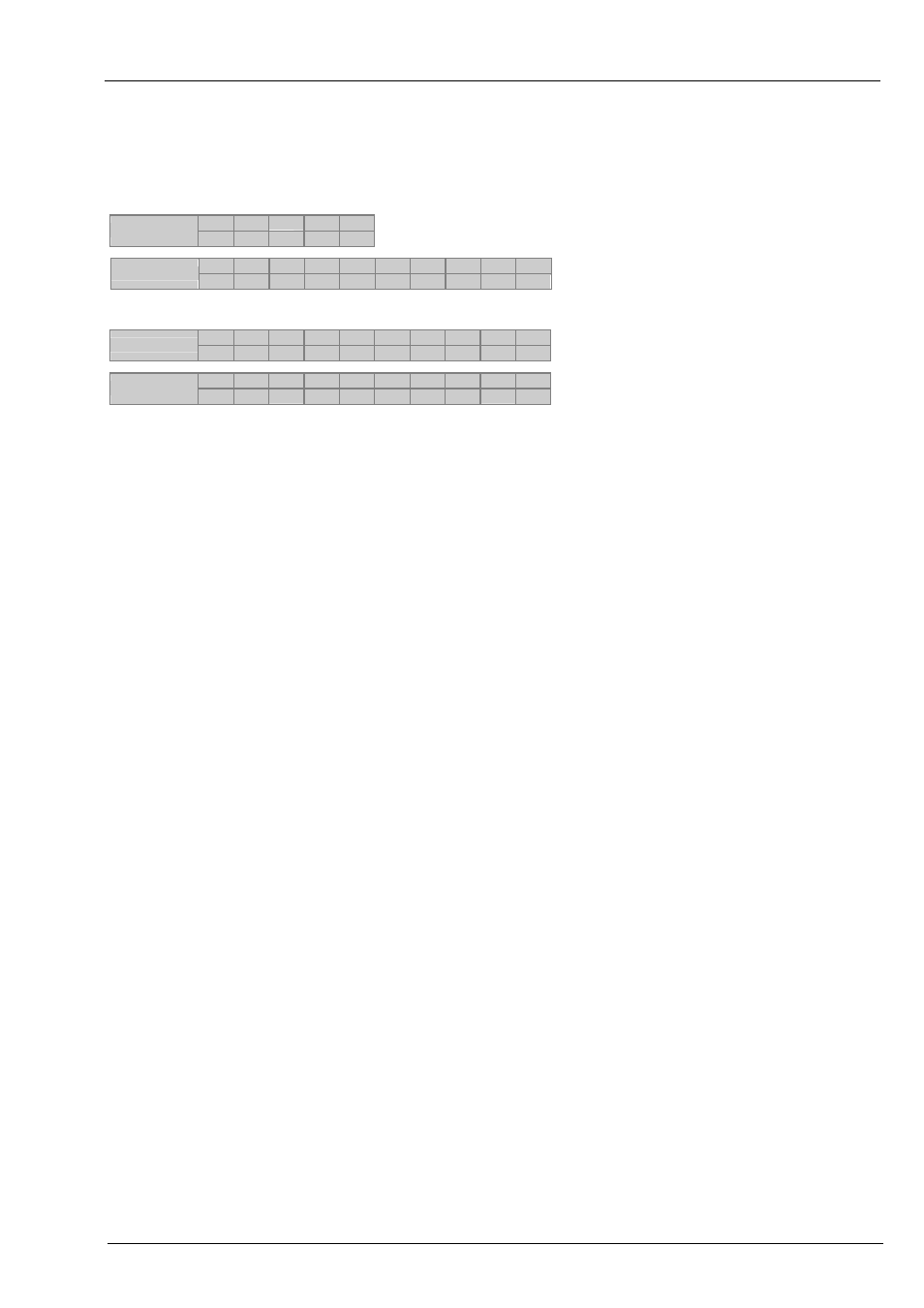
Example 1: Read bit parameter (Data 1 to Data 3 = 80h; Data 4 to Data 5 = 30h)
SOH Adr Cmd EOT CRC
Transmission
01h 20h 6Dh 04h 56h
Bit parameter default
Example 2: Write bit parameter (key assignment = down; direction of motor rotation = down)
SOH Adr Cmd Data1 Data2 Data3 Data4 Data5 EOT CRC
Transmission
01h 20h 6Dh 81h 84h 80h 30h 30h
04h
92h
SOH Adr Cmd Data1 Data2 Data3 Data4 Data5 EOT CRC
Response
01h 20h 6Dh 81h 84h 80h 30h 30h
04h
92h
Significance of parameter „m“
Key assignment
This parameter assigns a specified direction of rotation to a certain key. For the mounting option “keypad below
display” and the remaining default parameters applies the following:
0 = Up
left/right key actuated = shaft rotation ccw/cw, counting mode UP/DOWN
1 = Down
left/right key actuated = shaft rotation cw/ccw, counting mode UP/DOWN
Motor direction of rotation
The parameter “motor direction of rotation” enables inversion of the two output signals for motor ccw (pin B) and
motor cw (pin C) provided at the motor cable.
0 = Up
standard direction of rotation
1 = Down
inverted direction of rotation
Jog
The jog function makes the motor run by a defined number of steps upon a short stroke on a key. The holding
time does not matter as long as it is not less than 400 ms. A holding time of > 400 ms results in permanent motor
run. Inferior holding times are accomplished as Jog. The number of steps is defined under parameter command
„l“, default parameter is 1.
Note: The respective step is always accomplished completely and cannot be stopped or restarted by actuating
any key during the motor positioning operation. However a stop by interface (command “D”) is possible. With
running motor the moving bit is set to 1 (refer also command “F”).
Setting the step width to 0 will disable the Jog function, both by keypad and by external inputs.
00 = Up
Jog only enabled with counting mode UP
01 = Down
Jog only enabled with counting mode DOWN
10 = Ever
Jog enabled with both counting modes UP/DOWN
11 = Only
Jog only enabled. Continuous movements actuated by keypad are disabled.
Shaft type
The shaft type parameter assigns the shaft type.
Some applications may call for different treatment of radially and axially operated shafts what is already taken into
consideration when utilizing the Baumer IVO master. For example, only certain shafts shall be displayed in DIM
mode. Other controls (for example PLC or PC) may utilize this parameter for general assignments.
00 = radialDim This is a radial shaft displayed in DIM mode.
01 = axialDim This is an axial shaft displayed in DIM mode.
10 = radial
This is a radial shaft not displayed in DIM mode.
11 = axial
This is an axial shaft not displayed in DIM mode.
SOH Adr Cmd Data1 Data2 Data3 Data4 Data5 EOT CRC
Response
01h 20h 6Dh 80h 80h 80h 30h 30h
04h
F2h