Encoder position-object – Baumer GXP8W User Manual
Page 9
Manual_GXP8W_EN.doc
9/13
Baumer IVO GmbH & Co. KG
04.05.11
Villingen-Schwenningen,
Germany
8. Encoder Position-Object
The Encoder Position Object is a manufacturer-specific object with class code 2Fh.
Entity attributes
Due to their different functionality, entity attributes are broken down into two groups.
The first group, attribute 1 to 12 comprises the parameters for position calculating.
The second group, attribute 90 to 95 comprises the diagnostic functions.
Altered parameters are not stored in the non-volatile memory until by service “save”.
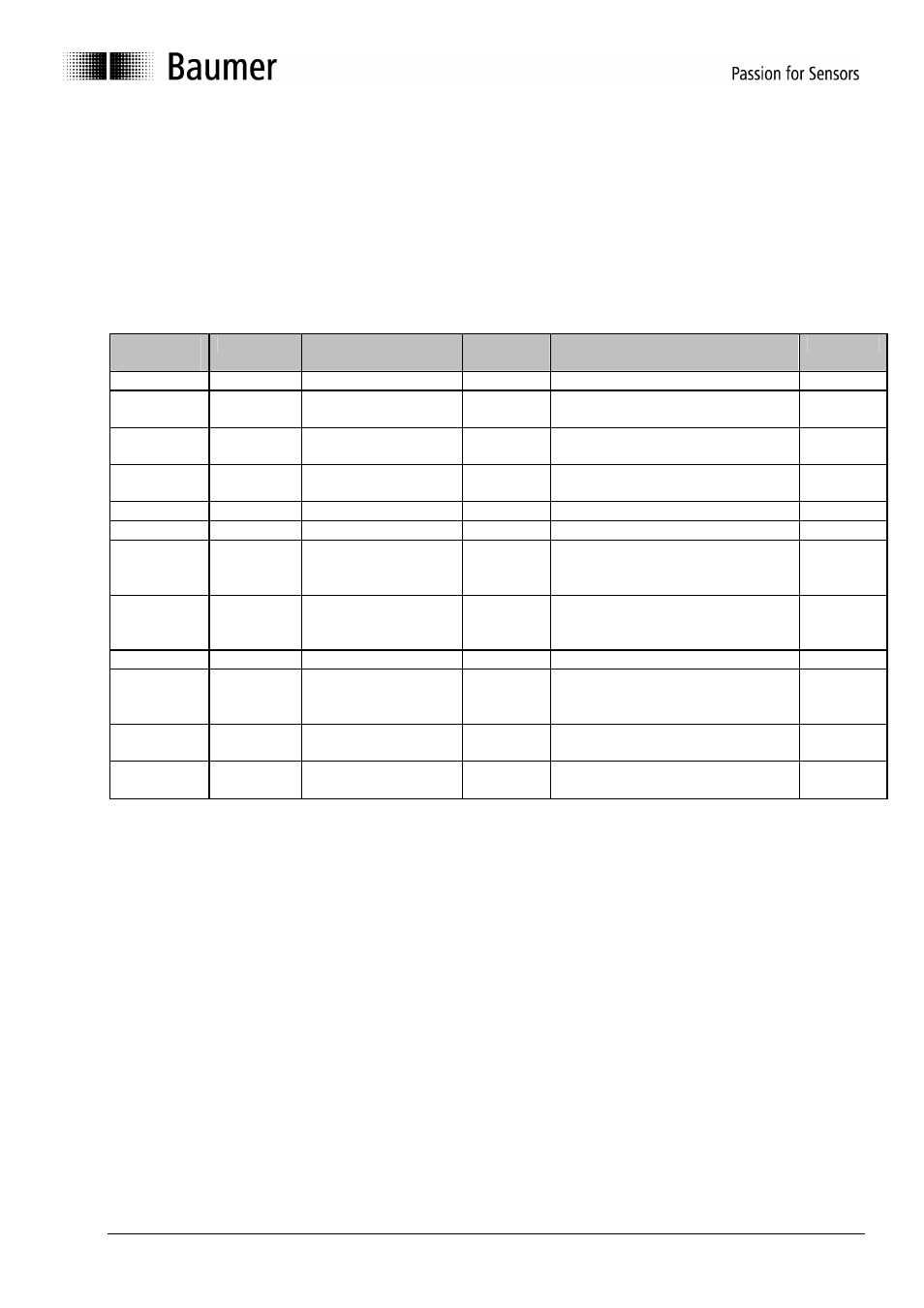
Chart: Parameters for position calculating
Attribute -
ID
Access
Name
Data type Significance
Values
1
read
Number of attributes USINT
Number of attributes supported
2 read
Attributes Array
of
USINT
List of attributes supported
3 read/
write
Sense of rotation
BOOL
Setting the sense of rotation
0 = CW
1 = CCW
4 read
Internal
diagnostic
function
BOOL
Not used
0 = OFF
5
read
Scaling function
BOOL
Scaling function active
1 = ON
6
read
Position format
USINT
Position value format
0 = steps
7
read/ write Steps per revolution
UDINT
Number of desired steps per
revolution
see
operating
parameter
8
read/ write Total resolution
UDINT
Number of desired steps
exceeding the measurement
range
see
operating
parameter
9 read
Reserved UDINT
reserved
=
0
10
read/ write Preset value
UDINT
Position value is set to the preset
value
see
operating
parameter
11
read/ write COS-Delta
DINT
Minimum divergent value of the
position in COS mode
1 to total
resolution
12
read
Position value
DINT
actual position value
1 to total
resolution
Steps per revolution
The parameter „steps per revolution“ defines the number of steps per revolution. Upon setting this parameter,
the total resolution will change correspondingly according the following formula:
Total resolution = steps per revolution x revolutions
Sense of rotation
The sense of rotation defines whether the position values are increasing with clockwise rotation (CW) or
counterclockwise rotation (CCW) of the shaft.
Total resolution in steps
The parameter „total resolution in steps“ defines the total number of steps covering the complete
measurement range.
Example: steps per revolution = 3600; revolutions = 256; Æ total resolution = 3600 x 256 = 921600
If the number of revolutions relating to a value is programmed unequal 2
n
(1, 2, 4,...65536), the encoder must
be parameterized anew after crossing the encoder zero point in powerless state.