Hudson Robotics SoftLinx 5.0 User Manual
Page 38
38
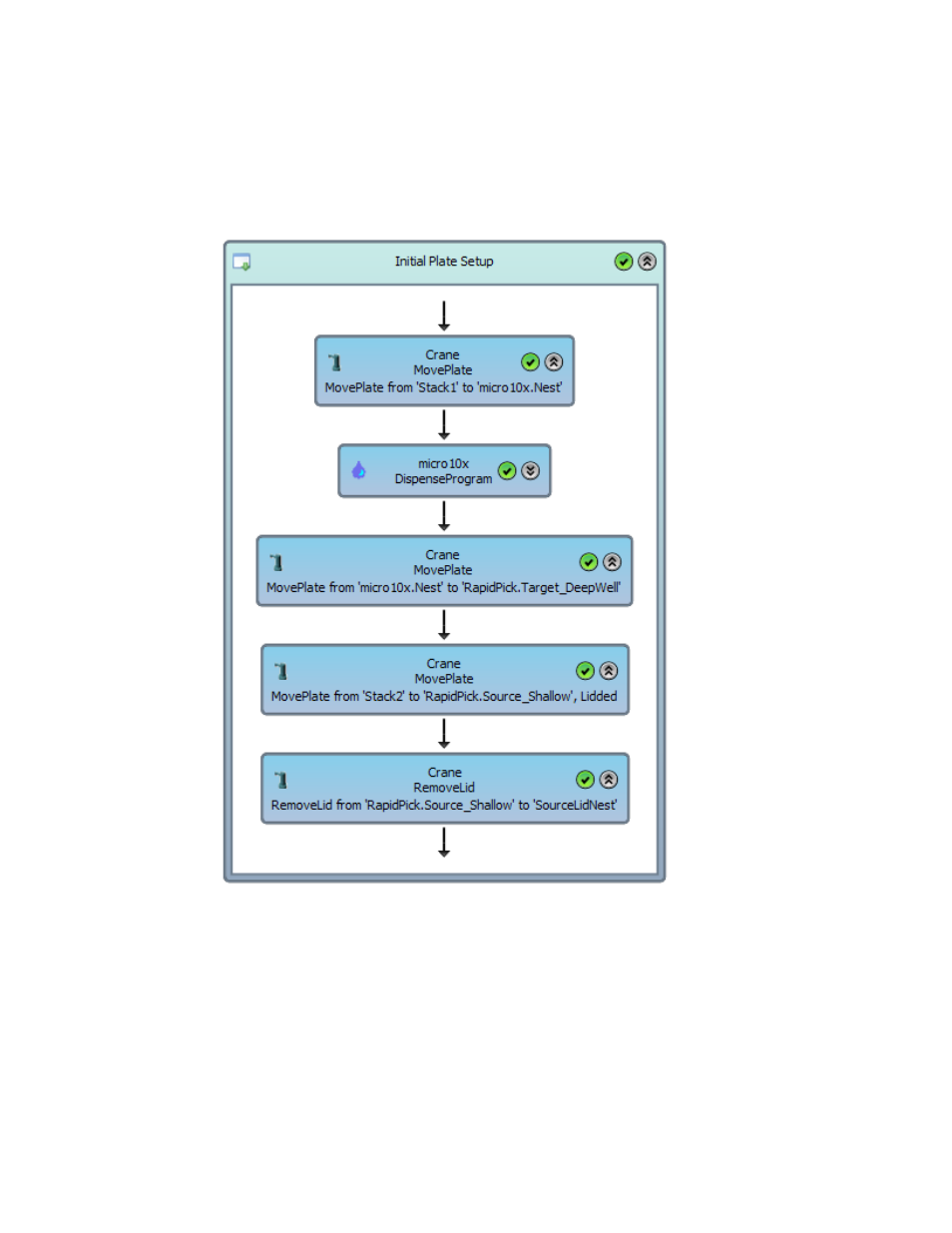
- Dispense liquid to the target plate.
- Move the prepared target plate to the RapidPick.
We can start by placing all the steps in a linear fashion, like so:
This will work and load the plates. However, we don't have to wait for the micro 10 to be finished with the
target plate before we move the other source plate. We can modify this part of the protocol even further by
using a parallel process activity to run multiple instruments at once.
Place a parallel process onto the canvas. Place the Micro 10 dispense step and the move target plate step
in one branch, and the two steps that handle the source plate in another branch.
This part of the protocol will look like this: