4 gain – DJI Naza-M Lite User Manual
Page 18
©2014 DJI. All Rights Reserved.
18
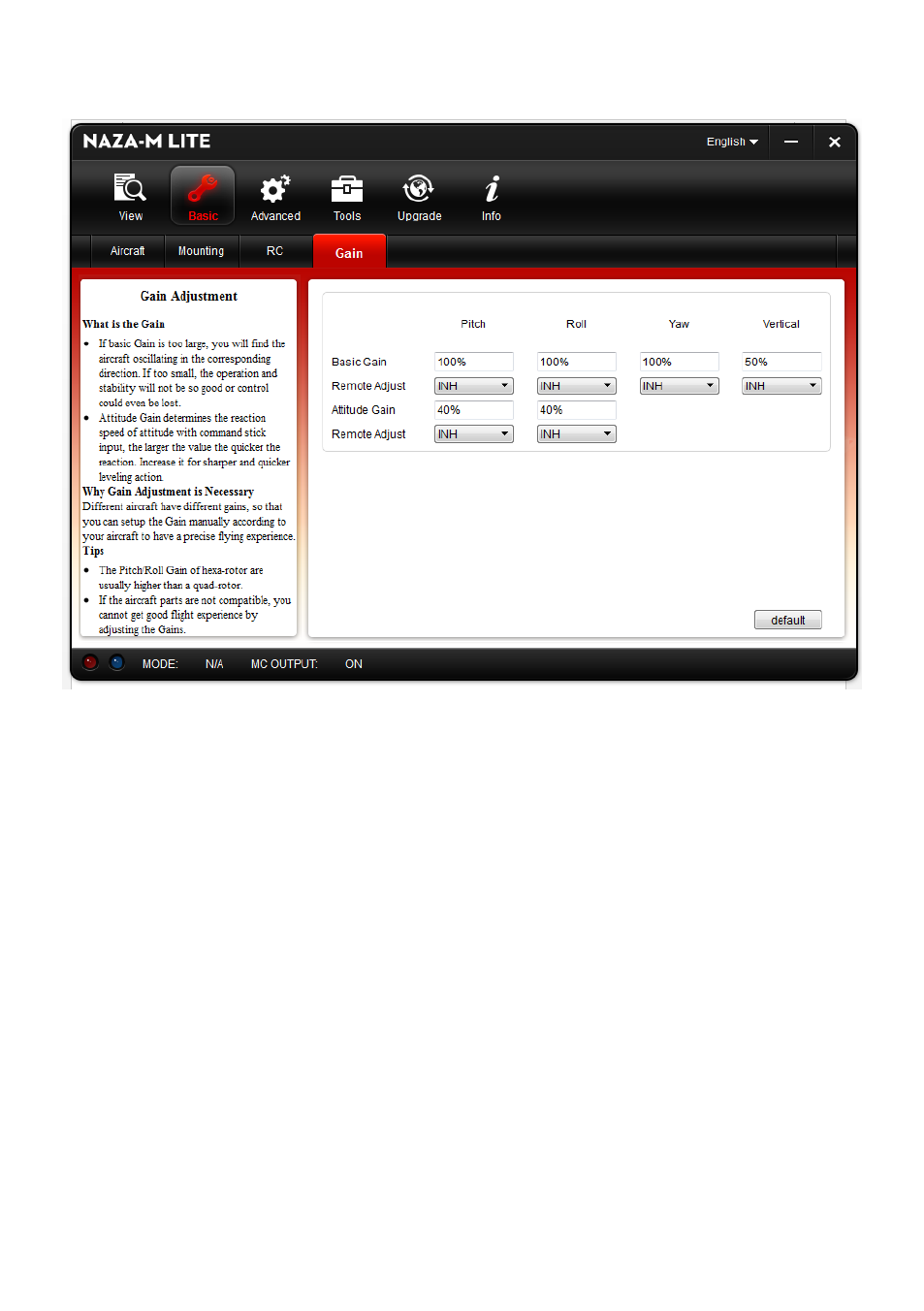
4 Gain
Usually, the default parameters are ready to go. However, different multi-rotors have different gains because of
different Motor KV ratings, ESC and propeller sizes. If the gain is set too high, you will find the multi-rotor will be
oscillating in the corresponding direction (About 5~10Hz). If the Gain is too low, the multi-rotor will likely to be hard
to control. So you can still setup the basic Gain of Pitch, Roll, Yaw and Vertical manually according to your multi-rotor
to have a wonderful flying experience. We suggest you to change 10% to 15% of the parameter at a time.
For the gains of the Pitch and Roll, if you release the Pitch or Roll stick after giving a command, the multi-rotor should
go back to a hovering state. If the reaction of multi-rotor in this procedure is too soft (large delay), please increase
the basic gain slowly (10%-15% each time) after you release the stick until vibration begins. Then decrease the gain a
little until vibration just disappears. Now the gain is perfect, but the reaction of the attitude change is slow. Follow
the Procedure at the end of this section to tune the attitude gains.
The way of tuning the Yaw gain is the same as the way of adjusting the Tail Gyro. If you want fast stick reaction speed,
increase the gain, otherwise decrease the gain. However, the spin of multi-rotor is produced by the counter torque
force, and the magnitude of which is limited. Therefore, large gain will not produce tail vibration like helicopter, but
severe reaction at the start or stop of motors, which will affect the stabilization of the other directions.