Motor dimensions (100…165 mm frame sizes) – Rockwell Automation VPL-xxxx Kinetix VP Low-inertia Servo Motor 063…165 mm Frame User Manual
Page 12
12 Kinetix VP Low-inertia Servo Motor with 063…165 mm Frame Size
Rockwell Automation Publication VPL-IN001C-EN-P - November 2013
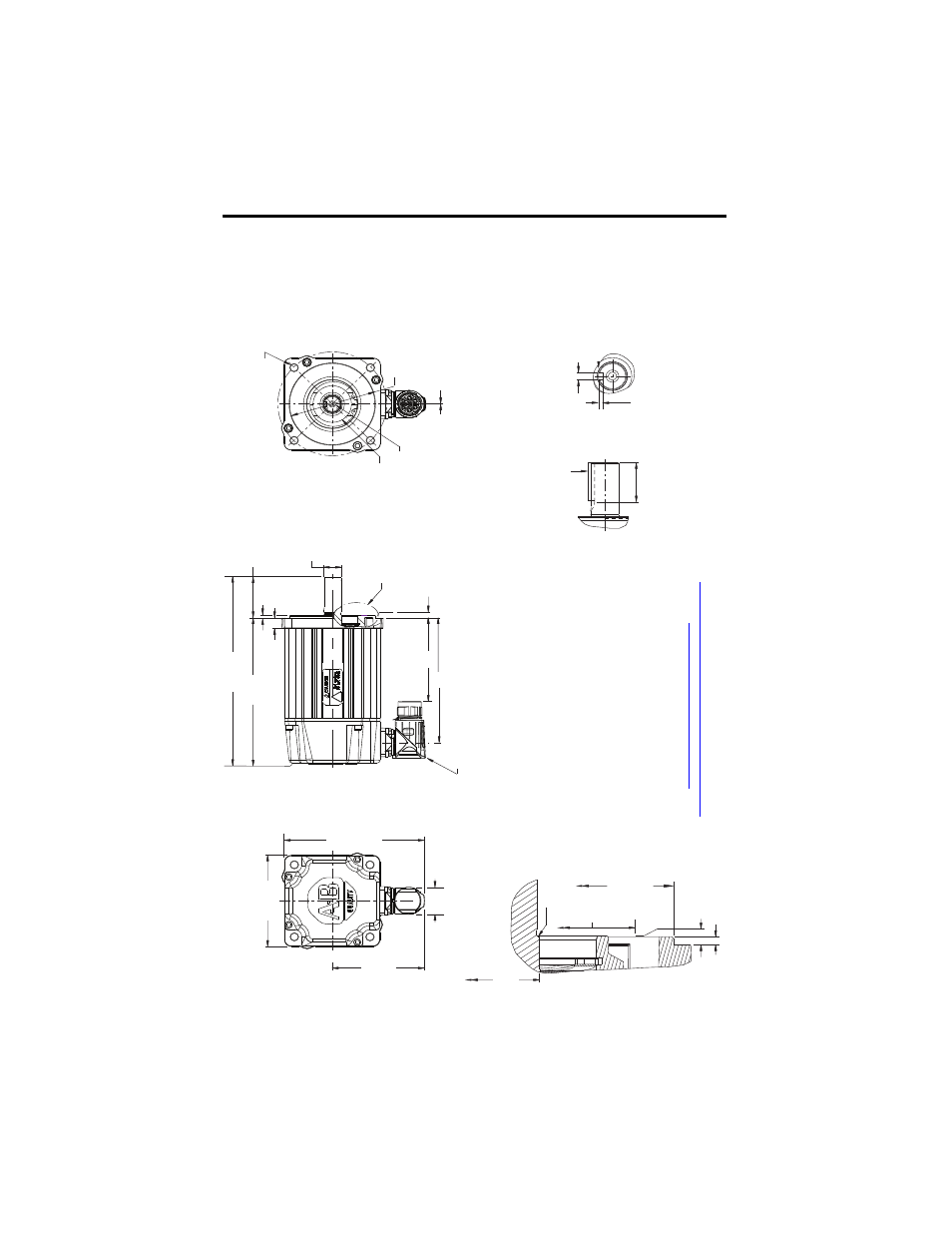
Motor Dimensions (100…165 mm frame sizes)
S
D
iameter Holes on
M
D
iameter B
olt
C
ircl
e
N
(pi
lot
di
ameter)
Opt
io
nal
S
haft
Se
al
M2
3
Co
nn
ec
to
r =
2
6.
6
(1
.0
5)
M4
0
Co
nn
ec
to
r =
4
5.
0
(1
.7
7)
Sh
aft
H
ole T
hr
ead
an
d Depth
0°
±
10
° S
haft E
nd Mar
k (
or
K
ey)
O
rient
at
ion
for
Encoder
Absolut
e P
ositio
n =
0.
N
(pil
ot dia
m
eter)
De
ta
il A
Ø 2
9.
92 (
1.1
78
)
Su
rf
ac
e
Sha
ft
Sh
oulder
Fl
us
h
to Pi
lot Hei
gh
t
±
0.
83 (
0.0
33
)
Pi
lo
t
Relief
D
iameter
Pi
lo
t Height
T
(p
ilo
t r
elief
he
ig
ht)
HD
AD
P
Co
nn
ec
tor
rotates
325
°
Ey
e-bolts
abse
nt
fr
om
sh
or
ter
motor
s.
LE
LD
LB
L - LB
T
LA
D
L
Key
No
t Show
n
For
Clar
it
y
Ke
yw
ay
D
ept
h
VP
L-
A/
B1
00
xx =
3.
00
…3.
10 (
0.1
18
…0.
122
)
VP
L-
A/
B1
15
xx =
3.
50
…3.
60 (
0.1
38
…0.
142
)
VP
L-
A/
B1
30
xx =
4.
00
…4.
20 (
0.1
58
…0.
165
)
VP
L-
B1
65
xx
=
4.0
0…4
.2
0 (0
.15
8…0
.1
65
)
Ke
yw
ay
W
idth
VP
L-
A/
B1
00
xx
=
4.
97
…5
.0
0 (0
.1
96
…0.1
97
)
VP
L-
A/
B1
15
xx
=
5.
97
…6
.0
0 (0
.2
35
…0.2
36
)
VP
L-
A/
B1
30
xx
=
7.
96
…8
.0
0 (0
.3
14
…0.3
15
)
VPL
-B165xx =
7.
96…8
.0
0 (0
.3
14
…
0.3
15
)
Opt
ion
al
Sh
af
t K
ey
Refer t
o
Det
ai
l A
Pi
lo
t Height
Ke
y Suppl
ie
d
VP
L-
A/
B1
00
xx =
5
(+
0, -0.03
0)
x
5
(+
0, -0
.030)
x 24 K
ey
VP
L-
A/
B1
15
xx =
6
(+
0, -
0.030)
x
6
(+
0, -0
.030)
x 24 K
ey
VP
L-
A/
B1
30
xx =
8
(+
0, -
0.036)
x
7
(+
0, -0
.090)
x 31 K
ey
VPL
-B
165xx = 8
(+
0, -
0.036)
x
7
(+
0, -0
.090)
x 39 K
ey
Ke
yw
ay
L
ength
VP
L-
A/
B1
00
xx =
25
.4
(1
.0
0)
VP
L-
A/
B1
15
xx =
25
.4
(1
.0
0)
VP
L-
A/
B1
30
xx =
32
.3
(1
.2
7)
VP
L-
B1
65
xx =
41
.1
(1
.6
2)
an
d
pr
ov
ide
saddi
tio
na
ldi
me
nsi
ons a
nd
to
le
ra
nc
es
no
td
et
ai
le
d
in
thi
s
di
ag
ra
m.