Mission planning operating parameters – 3D Robotics Aero-M User Manual
Page 9
8
The Aero is a complete solution for creating
high-resolution visual-spectrum aerial maps.
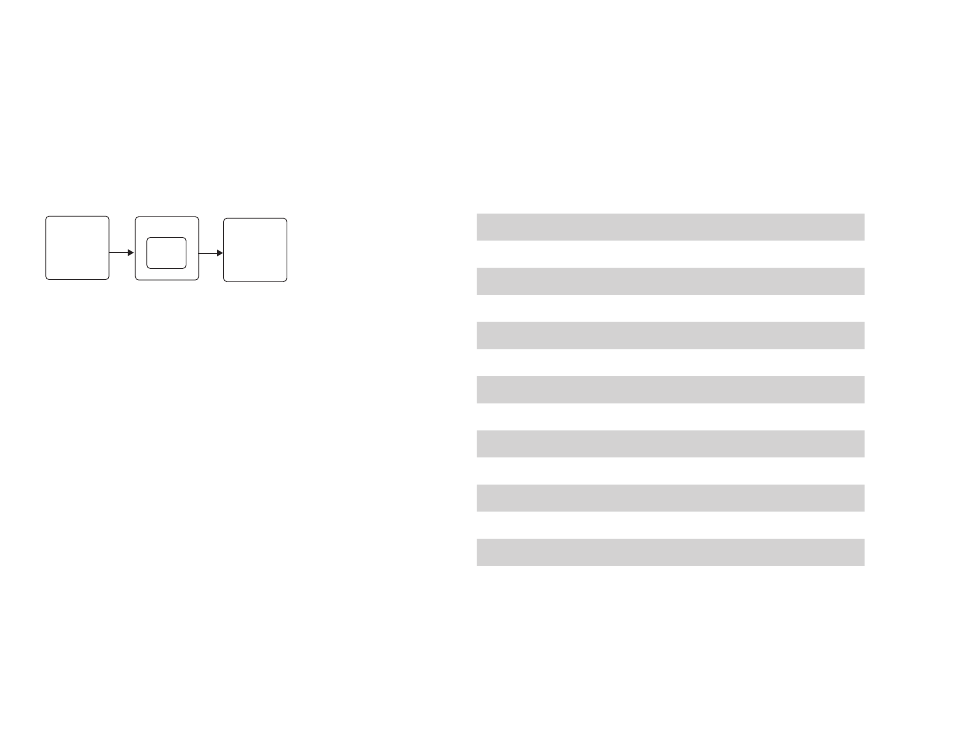
Pixhawk
autopilot
system
Pix4Dmapper
LT 3DR Edition
Canon SX260
3DR EAI
To create a map, the Aero flies an autonomous mission over
the survey site, using the integration between the Pixhawk
autopilot and custom-programmed camera to capture images
at a consistent distance interval. Pix4Dmapper then stitches
these images together into a georeferenced, orthorectified
mosaic.
The accuracy of the map depends on the configuration of the
mission. Planning a mission that captures high-quality images
requires balancing the Aero’s operating parameters with the
environmental factors at the survey site.
Operating Parameters
Camera
Canon SX260
Camera Orientation
Portrait (side facing forward)
Operating Altitude
80-120 m
Standard Operating Altitude
100 m
Low-Wind Conditions
0-6 m/s
High-Wind Conditions
7-10 m/s
Maximum Wind Conditions
10 m/s
Operating Speed
8-20 m/s
Default Speed
15 m/s
Estimated Maximum Flight Time
40 min
Estimated Ground Resolution
5 cm/pixel
Estimated Maximum Survey Area
1 km
2
Minimum Photo Interval
2 seconds
Mission Planning
Operating Parameters
Mapping system diagram