Reference – Lenze E94P PositionServo Modbus User Manual
Page 36
36
P94MOD01C
Reference
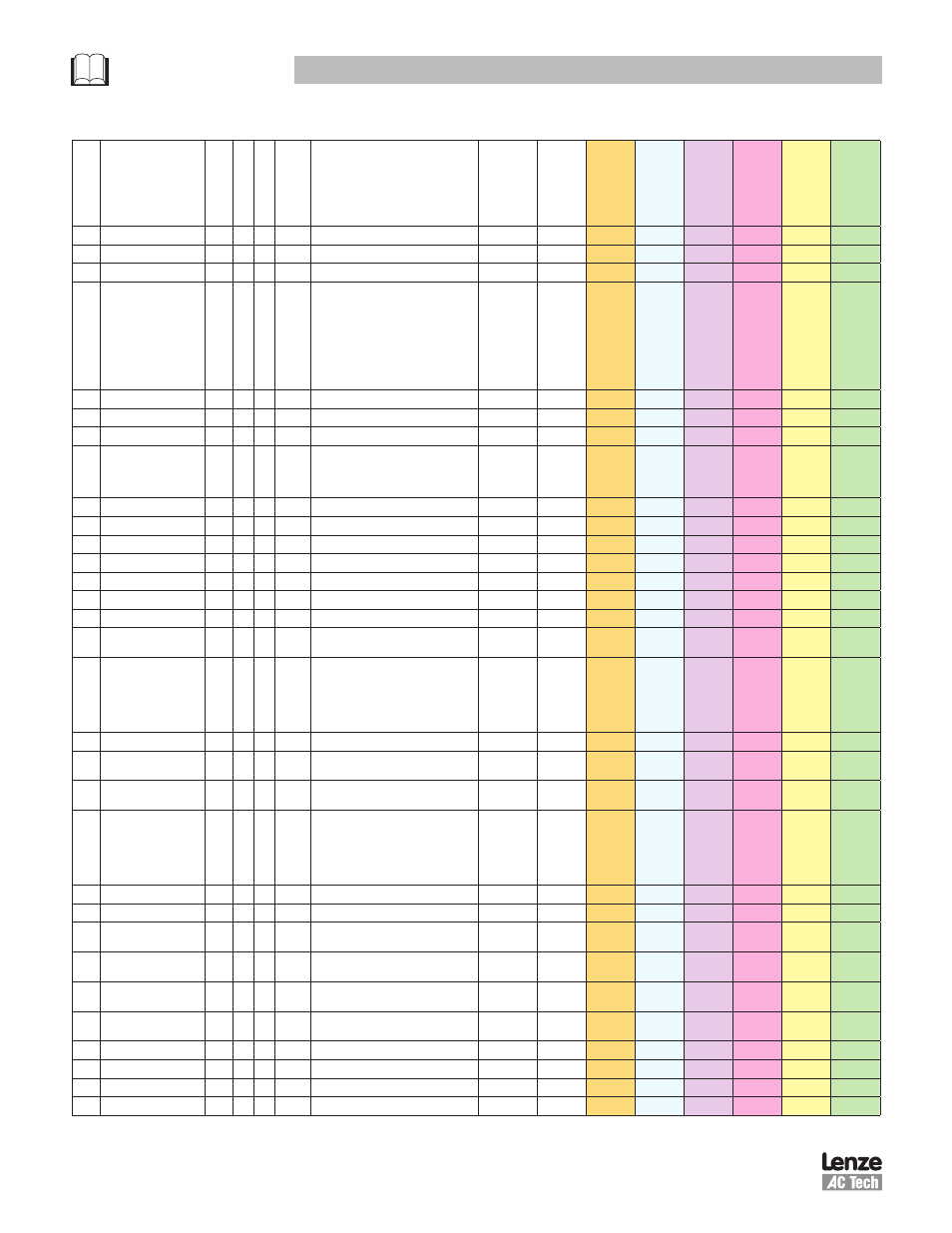
Index
Name
Type
Format
EPM
Access
Description
Range
Unit
RAM
Registers
32bit
Integer
Access
4X
Register #
RAM
Register
32bit
Float
Access
4X
Register #
EPM
Reg Copy
32bit
Integer
Access
4X
Register #
EPM
Reg Copy
32bit
Float
Access
4X
Register #
RAM
Register
16bit
Signed
Integer
4X
Register #
EPM
INT16
4X
Register #
203
VAR_IN9_DEBOUNCE
W
Y
R/W
Input C2 de-bounce time in mS
0 - 1000
mS
407
919
1431
1943
2252
2508
204
VAR_IN10_DEBOUNCE
W
Y
R/W
Input C3 de-bounce time in mS
0 - 1000
mS
409
921
1433
1945
2253
2509
205
VAR_IN11_DEBOUNCE
W
Y
R/W
Input C4 de-bounce time in mS
0 - 1000
mS
411
923
1435
1947
2254
2510
206
VAR_OUT1_FUNCTION
W
Y
R/W
Programmable Output 1 Function
0 - Not Assigned
1 - Zero Speed
2 - In Speed Window
3 - Current Limit
4 - Run time fault
5 - Ready
6 - Brake
7 - In position
0 - 7
413
925
1437
1949
2255
2511
207
VAR_OUT2_FUNCTION
W
Y
R/W
Programmable Output 2 Function
0 - 7
415
927
1439
1951
2256
2512
208
VAR_OUT3_FUNCTION
W
Y
R/W
Programmable Output 3 Function
0 - 7
417
929
1441
1953
2257
2513
209
VAR_OUT4_FUNCTION
W
Y
R/W
Programmable Output 4 Function
0 - 7
419
931
1443
1955
2258
2514
210
VAR_HALLCODE
W
N
R
Current hall code
Bit 0 - Hall 1
Bit 1 - Hall 2
Bit 2 - Hall 3
421
933
1445
1957
2259
2515
211
VAR_ENCODER
W
N
R
Primary encoder current value
EC
423
935
1447
1959
2260
2516
212
VAR_RPOS_PULSES
W
N
R
Registration position
EC
425
937
1449
1961
2261
2517
213
VAR_RPOS
F
N
R
Registration position
UU
427
939
1451
1963
2262
2518
214
VAR_POS
F
N
R/W
Target position
UU
429
941
1453
1965
2263
2519
215
VAR_APOS
F
N
R/W
Actual position
UU
431
943
1455
1967
2264
2520
216
VAR_POSERROR
W
N
R
Position error
EC
433
945
1457
1969
2265
2521
217
VAR_CURRENT_VEL
F
N
R
Set-point (target) velocity (demanded value)
UU/S
435
947
1459
1971
2266
2522
218
VAR_CURRENT_ACCEL
F
N
R
Set-point (target) acceleration (demanded
value)
UU/S2
437
949
1461
1973
2267
2523
219
VAR_TPOS_ADVANCE
W
N
W
Target position advance. Every write to this
variable adds value to the Target position
summing point. Value gets added once per
write. This variable useful when loop is
driven by Master encoder signals and trying
to correct phase. Value is in encoder counts
EC
439
951
1463
1975
2268
2524
220
VAR_IOINDEX
W
N
R/W
Same as INDEX variable in user’s program.
441
953
1465
1977
2269
2525
221
VAR_PSLIMIT_PULSES
W
Y
R/W
Positive Software limit switch value in
Encoder counts
EC
443
955
1467
1979
2270
2526
222
VAR_NSLIMIT_PULSES
W
Y
R/W
Negative Software limit switch value in
Encoder counts
EC
445
957
1469
1981
2271
2527
223
VAR_ SLS_MODE
W
Y
R/W
Soft limit switch action code:
0 - no action
1- Fault
2- Stop and fault (When loop is driven by
trajectory generator only. With all other
sources same action as 1)”
0 - 2
447
959
1471
1983
2272
2528
224
VAR_PSLIMIT
F
Y
R/W
Same as var 221 but value in User Units
UU
449
961
1473
1985
2273
2529
225
VAR_NSLIMIT
F
Y
R/W
Same as var 222 but value in User Units
UU
451
963
1475
1987
2274
2530
226
VAR_SE_APOS_PULSES
W
N
R
2nd encoder actual position in encoder
counts
EC
453
965
1477
1989
2275
2531
227
VAR_SE_POSERROR_
PULSES
W
N
R
2nd encoder position error in encoder counts
EC
455
967
1479
1991
2276
2532
228
VAR_MODBUS_PARITY
W
Y
R/W
Parity for Modbus Control:
0 - No Parity; 1 - Odd Parity; 2 - Even Parity
0 - 2
457
969
1481
1993
2277
2533
229
VAR_MODBUS_STOPBITS
W
Y
R/W
Number of Stopbits for Modbus Control
0 - 1.0; 1 - 1.5; 2 - 2.0
0 - 2
459
971
1483
1995
2278
2534
230
VAR_M_NOMINALVEL
F
Y
R/W
Induction Motor Nominal Velocity
500 - 20000
RPM
461
973
1485
1997
2279
2535
231
VAR_M_COSPHI
F
Y
R/W
Induction Motor Cosine Phi
0 - 1.0
463
975
1487
1999
2280
2536
232
VAR_M_BASEFREQUENCY
F
Y
R/W
Induction Motor Base Frequency
0 - 400Hz
Hz
465
977
1489
2001
2281
2537
233
VAR_M_SERIES
Induction Motor Series
467
979
1491
2003
2282
2538