Commissioning, 4 drive monitoring, 5 controlling the drive – Lenze E94P PositionServo Modbus User Manual
Page 22: 6 changing drive parameters
22
P94MOD01C
Commissioning
4.4 Drive Monitoring
The master/client can read the drive parameters as long as Modbus communications are enabled.
NOTE:
The complete list of variables can be found in the PositionServo Programming Manual (PM94P01, PM94M01).
4.5 Controlling the Drive
Controlling the drive over Modbus is essentially identical to controlling the drive from the User’s program. The
list of variables and their functionality is identical for both User’s program and Modbus control. Refer to the
variable list in the PositionServo Programming Manual for the functionality of the drive’s variables.
4.6 Changing Drive Parameters
To change drive parameters, simply write to the appropriate register as listed in the PositionServo Programming
Manual (PM94P01 or PM94M01).
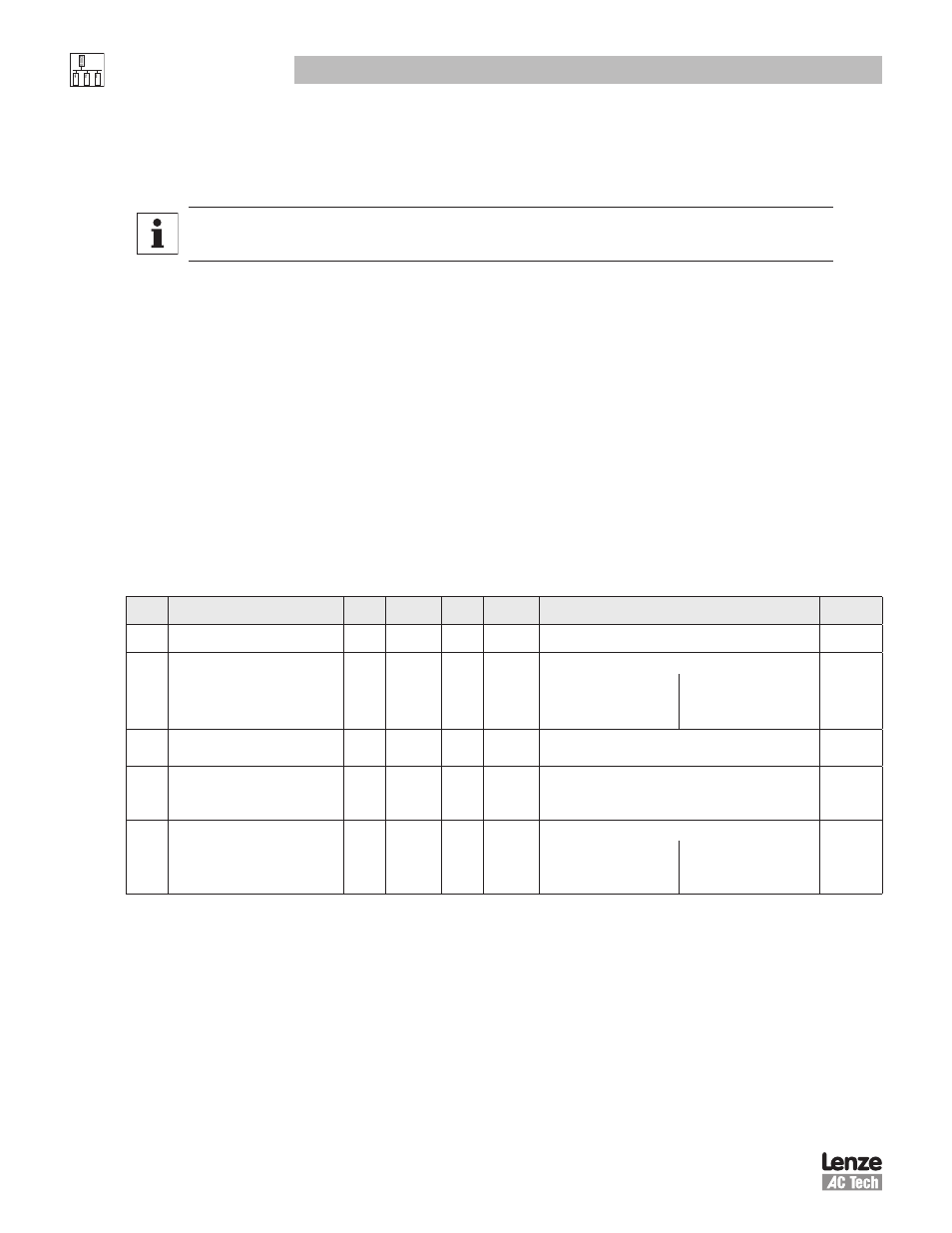
4.7 EIA-485 (RS485) Parameters
Drive variables #172-176 are EIA-485 (RS485) communication programming parameters specifically for
configuration of the EIA-485 interface.
Table 5: EIA-485 (RS485) Variables - Excerpted from PS Variable List
PID
Variable Name
Type Format EPM Access Description
Units
172
VAR_SERIAL_ADDRESS
W
Y
R/W RS485 drive ID. Range: 0 - 254
173
VAR_MODBUS_BAUDRATE
W
Y
R/W
Baud rate for Modbus operations:
2 - 9600
3 - 19200
4 - 38400
5 - 57600
6 - 115200
174
VAR_MODBUS_DELAY
W
Y
R/W
Modbus reply delay in mS
Range: 0 - 1000
mS
175
VAR_RS485_CONFIG
W
Y
R/W
RS485 configuration:
0 - normal IP over PPP
1 - ModBus
176
VAR_PPP_BAUDRATE
NOTE: Does NOT apply
to MVOB.
W
Y
R/W
RS232/485 (normal mode) baud rate:
2 - 9600
3 - 19200
4 - 38400
5 - 57600
6 - 115200