Function block library lenze9300servo.lib – Lenze DDS Function library 9300 Servo User Manual
Page 23
Function block library Lenze9300Servo.lib
Special functions
2.1.2
Supply−failure control (L_MFAIL)
2−13
L
Lenze9300Servo.lib EN 1.1
Fine setting of the supply−failure control
For the fine setting, you will have to repeat the following points several times.
1. Obtain a very low final speed without the controller reaching the undervoltage threshold LU:
– Increase the proportional gain nVp .
– Reduce the integral−action time nTn .
2. Avoid activation of the brake unit or the overvoltage threshold:
– Increase the integral−action time nTn until the characteristic in Abb. 2−11 is almost reached.
– If necessary, also reduce the setpoint of the DC−bus voltage at nDCSet_a (in the example
C0472/19 ( FCODE_nC472_19_a )).
3. An increase of the run−down/deceleration time or reduction of the brake torque (see
Abb. 2−12) is only possible with restrictions:
– Increasing the acceleration time nTi reduces the initial brake torque and simultaneously
increases the deceleration time.
– Increasing the intergral−action time nTn reduces the initial brake torque and simultaneously
increases the deceleration time. If the integral−action times are too long, the controller
reaches the LU threshold before zero speed is reached. The drive is thus no longer under
control.
4. Re−establish any signal connections which may be required to the outputs of the drive
controller (terminals X6).
Note!
Use C0003 to save all settings im a parameter set, if they are to be retained on power−off.
t
U G
t 1
t 2
t
n
0
0
L _ C M P _ b O u t _ b
n D c S e t _ a
t 3
Q
T
S
R
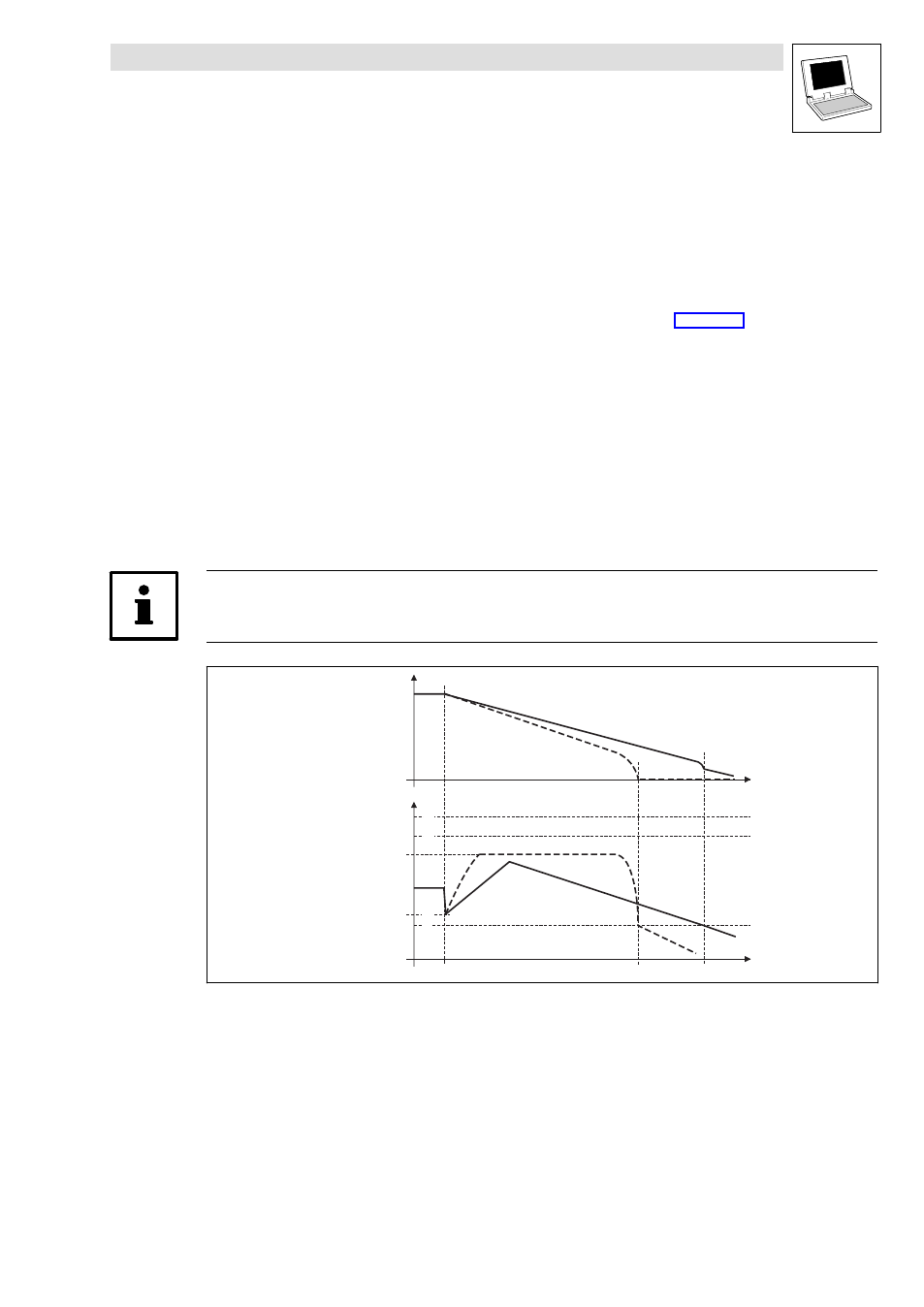
Abb. 2−12
Schematic representation with different brake torques
Switch−off threshold OU
Switch−on threshold for brake unit
Threshold
Threshold LU
n
Speed of the drive
t = t1
Supply−failure
t = t2
Zero speed with higher brake torque (short adjustment time)
t = t3
Drive reaches the LU switch−off threshold with lower brake torque (high adjustment time),
without reaching zero speed
t > t3
Drive is no longer under control (is braked by friction)