Seiwa SW AP01 User Manual
Page 36
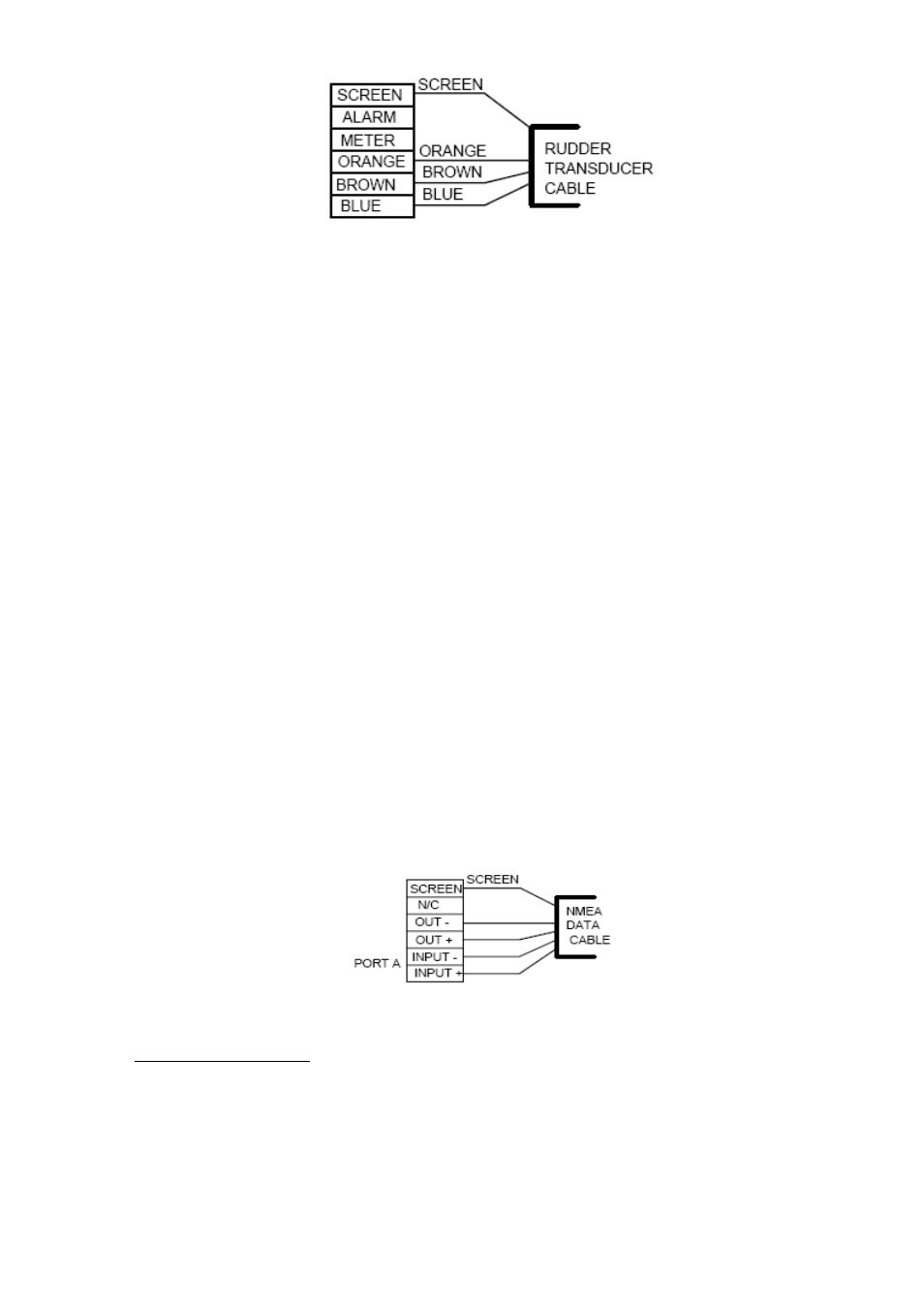
Figure 3.8. Rudder transducer connections.
When carrying out the setup procedure (Sec 2.2) at a later stage, it may be necessary
to adjust the zero position of the transducer. To do this, loosen the clamp holding the
transducer arm. Very slowly rotate the shaft with a screwdriver until the reading is
correct. A small turn of the shaft makes a big difference to the centre.
3.5 Attachment
3.5.1 REMOTE ALARM
A piezoelectric beeper is available which repeats the internal alarm and key beeps of the
Controller. This two-wire unit is connected between the ALARM (positive) and GREEN
(negative) terminals of the Rudder Transducer socket. Any beeper may be used which is
compatible with the drive available of 35mA (max) at 10.5V dc.
3.5.2 NMEA INTERFACES
The Junction Box has two NMEA input ports for navigation, wind and heading data. There is
also one output port for heading data. Both input ports are sampled continuously so that a
given cable can be connected to either. But two cables must not be connected in parallel to
one input. The Port A socket is shown in Fig 3.11, while the Port B input, which is shared
with the gyro, was shown in Fig 3.10.
Figure 3.11 NMEA data cable connections.
34