RMS Technologies R325 DRIVER W/PDT User Manual
Page 22
RMS Technologies
Page 22
Version 1.20
R325IE Single Axis Controller/Driver Manual
02/13/2006
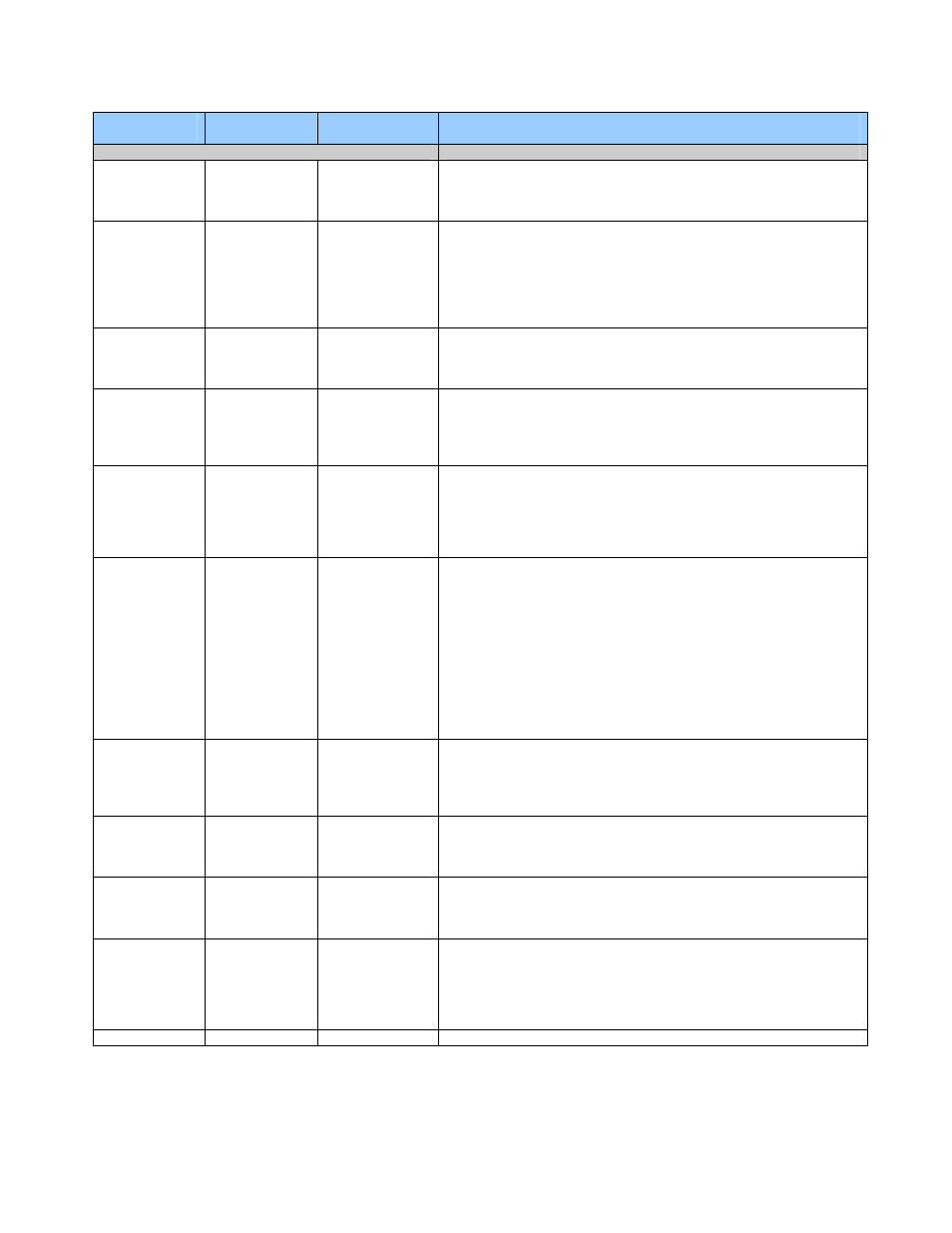
Command
(Case Sensitive)
Operand
Example
Description
ENCODER VERSION COMMANDS
CE +/- 16777215
(Motor Position
in Encoder
counts)
#ACE
*ACE12345
Current Encoder – Query Only
- Returns a 16-bit signed value, corresponding to the current
motor position encoder count. (See Encoder Mode)
EA 0, 1, 2
#AAEA2
Sets Error
Action to
Correct Mode
Error Action – Command or Query
Default = 2
- Reads or sets a value that determines the action to be taken
when an encoder error is found
0 – The error is reported via the optocoupled output
1 – The error is reported and the motor is stopped
2 – The error is reported and the correction move is made
EI 0, 1
#AEI1
Encoder
Installed True
Encoder Installed – Command or Query
Default = 1
- Read or set TRUE (1) or FALSE (0)
EL 0 - 16777215
#AEL400
Sets the
encoder line
count to 400
Encoder Lines – Command or Query
Default = 400
- Encoder lines per motor revolution
- Reads or sets the encoder line count. This is used in
conjunction with Encoder Mode to calculated motor positions.
EM 1, 2
#AEM2
Sets the
Encoder Mode
to 2
Encoder Mode – Command or Query
Default = 2
- Reads or sets the operating mode of the Encoder Interface IC.
A value of 1 returns one Encoder Count per Encoder Line. A
value of 2 returns 2 Encoder Counts per Encoder Line. Only 1
and 2 are valid.
EP 0 – 16777215
#AEP10
Error Permitted- Command or Query
- Reads or sets the maximum error allowed before Error Action is
taken. Depending on the system configuration, the value is
given in either Encoder Counts or Steps at the current Step
Resolution.
- If the product of Encoder Lines and Encoder Mode is larger than
the product of Motor Steps and Step Resolution, then the value is
in Encoder Counts. Otherwise it is in Steps.
Note: The minimum value is the number of the finer resolution
Encoder Counts or Steps required to make up one unit of the
coarser resolution.
ER 0 - 16777215
#AER
*AER5
Error Read – Query Only
- Returns the current Encoder Error value. If the product of
Encoder Lines and Encoder mode is larger than the product of
Motor Steps and Step Resolution, then the error is in Encoder
Counts. Otherwise it is in Steps.
GA -
#AGA
Go Target A – Command Only
This applies to “Go Target B, C, D, E, F, G, H”
Initiates position move to the corresponding Target Position set
by TA.
MF -
#AMF200
Sets Motor
Fullsteps to 200
Motor Fullsteps (per revolution) – Command or Query
Default = 200
Reads or sets the number of Fullsteps per motor revolution, i.e.
A 1.8° motor will have a Fullstep count of 200.
TA -
#ATA100
Target A – Command or Query
This applies to “Target B, C, D, E, F, G, H”
- Reads or sets the value of a preset Target Position in Fullstep
units as an absolute value
Initiates position move to the corresponding Target Position set
by TC.