RMS Technologies R325 DRIVER W/PDT User Manual
Page 19
RMS Technologies
Page 19
Version 1.20
R325IE Single Axis Controller/Driver Manual
02/13/2006
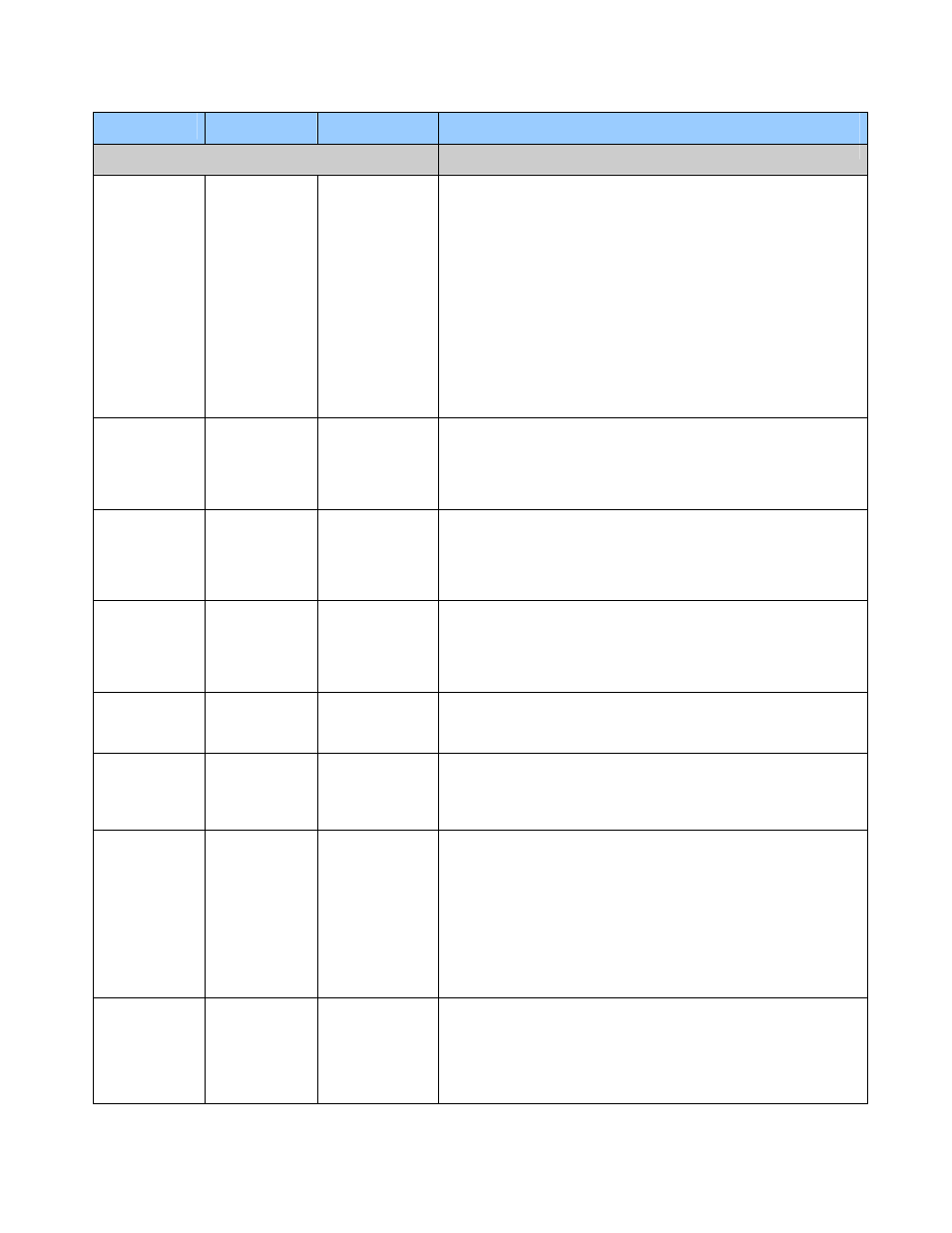
Command
(Case Sensitive)
Operand
Example
Description
VELOCITY & ACCELERATION (cont.)
PM +/-
2,000,000,000
#APM1000
Makes a 1000
step move from
the current
position
Position Move - Command Only
- Causes a ‘Relative Motion’ Position Move, using an
approximately trapezoidal profile. The initial velocity is defined
by ‘Start Velocity’ (SV), the profile ramp is defined by
‘Acceleration’ (AC), and the ‘Constant Velocity’ step rate by
‘Velocity Limit’ (VL). ‘Minimum Velocity’ (MV) is used to ensure
that the deceleration ramp does not set velocity to zero before
the target position is reached.
- It should be remembered that, while the ‘Position Move’ value
defines the number of steps to be made from the current
position, the value returned by ‘Current Position’ (CP) both
before and after a ‘Position Move’ are on an ‘Absolute’ step count
scale.
- CP readings can be used to determine PM values required to
reach any given position on the ‘Absolute’ step count scale.
Note: This command does not return a value.
SB -
#ASB
Moves one step
back
Step Back - Command Only
- Makes a single step move at the current step resolution
- Forward is defined as the direction the motor moves with the
‘Direction’ input in the FALSE state or with no connection.
Backwards is thus the direction the motor moves when the
‘Direction’ input is in the energized or TRUE state.
SF -
#ASF
Moves one step
forward
Step Forward - Command Only
- Makes a single step move at the current step resolution
- Forward is defined as the direction the motor moves with the
‘Direction’ input in the FALSE state, or with no connection.
Backwards is thus the direction the motor moves when the
‘Direction’ input is in the energized or TRUE state.
SM -
#ASM
Stops any
Position or
Velocity move in
progress
Stop Motion Command Only
- This command can be used to affect an end to any Position
Move or Velocity Move in progress. It has no effect on motion
produced by the Step and Direction inputs.
SV 256 - 15000
#ASV500
Start velocity
set to 500 PPS
Start Velocity - Command or Query
Default = 1000
- Reads or sets the velocity used for the first step in a position
move in steps/sec. Value based on motor performance.
VL 256 - 15000
#AVL5000
Sets the velocity
limit to 5000
steps/sec
Velocity Limit - Command or Query
Default = 15000
- Reads or sets the velocity used for Velocity Moves and the
constant velocity portion of a Position Move.
VM 250 - 50,000,
-250 - -50,000
or 0
#AVM1000
Starts a velocity
move of 1000
steps per
second
Velocity Move - Command Only
- The sign of the value determines the direction (positive for
forward and negative for backward) in which the velocity move is
made. The value sets the step rate in steps per second at the
current step resolution. Velocity cannot exceed Velocity Limit.
- The move begins at the set ‘Minimum Velocity’ (MV) with the
speed ramping to the command velocity at the rate set by
‘Acceleration’ (AC).
- Changes to new velocity values from new VM commands, will
also occur at the rate set by ‘Acceleration’ (AC).
Note: No value is returned. Zero velocity makes an abrupt stop