RMS Technologies R325 DRIVER W/PDT User Manual
Page 20
RMS Technologies
Page 20
Version 1.20
R325IE Single Axis Controller/Driver Manual
02/13/2006
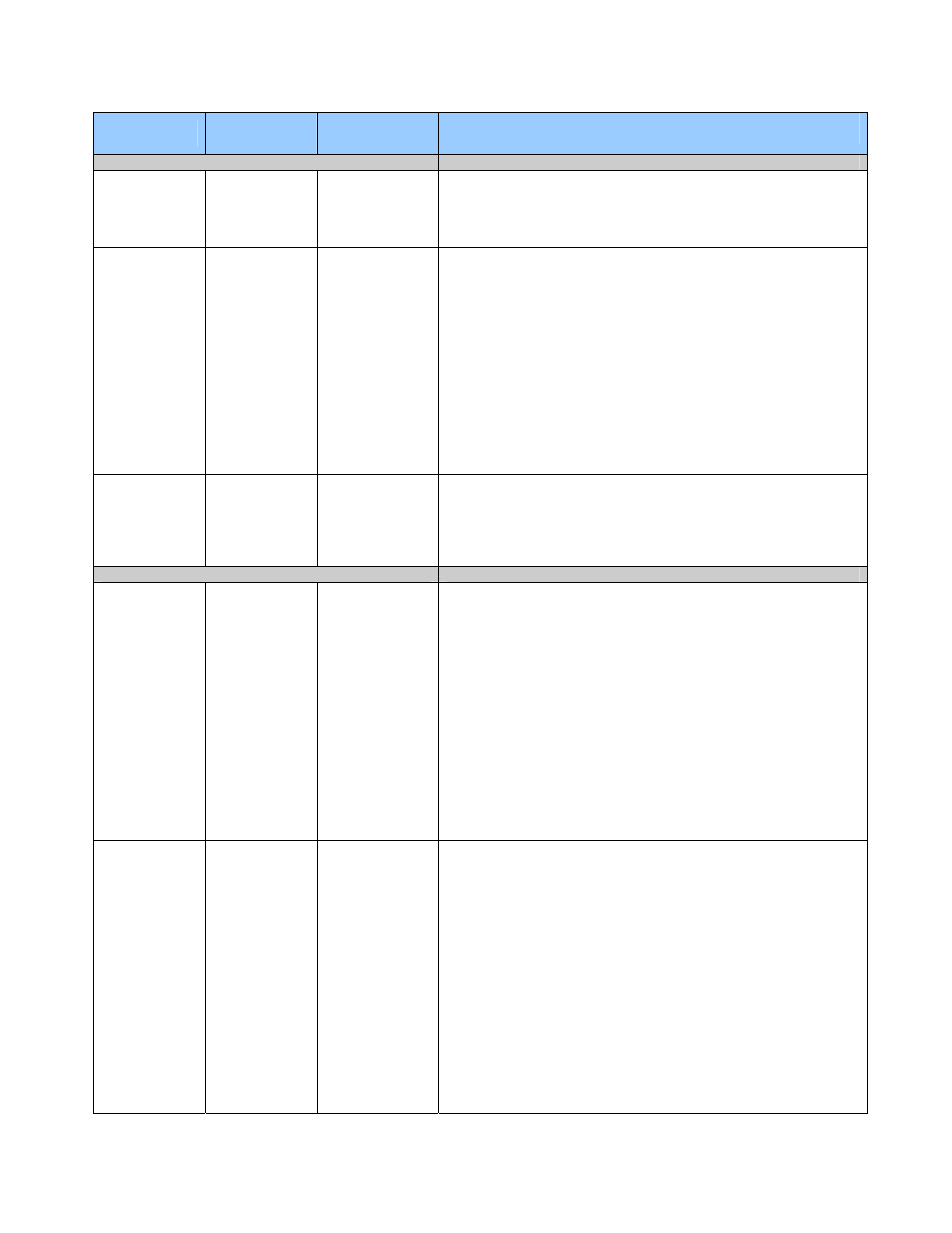
Command
(Case Sensitive)
Operand
Example
Description
SETTING CURRENT
HI 0-3000
#AHI300
Sets the Hold
Current to
300mA (0.3A)
Hold Current - Command or Query - 0 to 3000
Default = 300
- Reads or sets the motor Holding Current in 100 milliamps
increments. The value does not round.
RI 300 - 3000
#ARI1000
Sets the run
current to 1000
mA (1.0 Amp)
Run Current - Command or Query
Default = 1000
- Sets the motor Phase Current for any form of motion in
milliamps.
300 = 300mA (0.3 Amp)
2500 = 2500mA (2.5 Amp)
The last two numbers of the value are not read.
350 = 300mA, 2499 = 2400mA
- The set ‘Run Current’ is maintained for a time set by ‘Hold
Timeout’ (HT) before dropping to the current set by ‘Hold
Current’ (HI)
NOTE: Current of 2.7 Amp and above REQUIRES an
additional heatsink, make sure the temperature of the
bracket does not exceed 45° C
HT 100 -5000
#AHT100
Sets the Hold
Timeout to 100
mS
Hold Timeout - Command or Query
Default = 5000
- Reads or sets the time interval in milliseconds after any motor
movement, before the motor current is changed from Run
Current to Hold Current.
STORAGE & RECALL
LD -
#ALD
Loads all the
default values
Load Defaults - Command Only
- Loads all of the unit Default parameter values. A Save Data
(SD) command must be issued to have these values retained
during a power cycle.
Default values are:
Module Address 65 (A)
Acceleration 50
Absolute Position 0
Percent Fast Decay 2
Hold Current 300 (0.3A)
Hold Timeout 5000
Minimum Velocity 256
Run Current 1000 (1.0A)
Step Resolution 16
Start Velocity 1000
Velocity Limit 15000
SD -
#ASD
Saves data
Save Data - Command Only
- This command causes a set of parameter values to be written
to non-volatile memory. On power up the last set of values
written are set to be the parameter initial values.
-The parameters whose values are thus saved are:
My Address
Absolute Position
Velocity Limit
Minimum Velocity
Start Velocity
Acceleration
Hold Timeout
Step Resolution
Run Current
Hold Current
Percent Fast Decay