Beijer Electronics AN-BEI-P2-038 User Manual
Page 8
APPLICATION NOTE AN‐BEI‐P2‐038
Date: 15/02/12
AN‐BEI‐P2‐038 Modbus RTU Control and Register Mapping
8
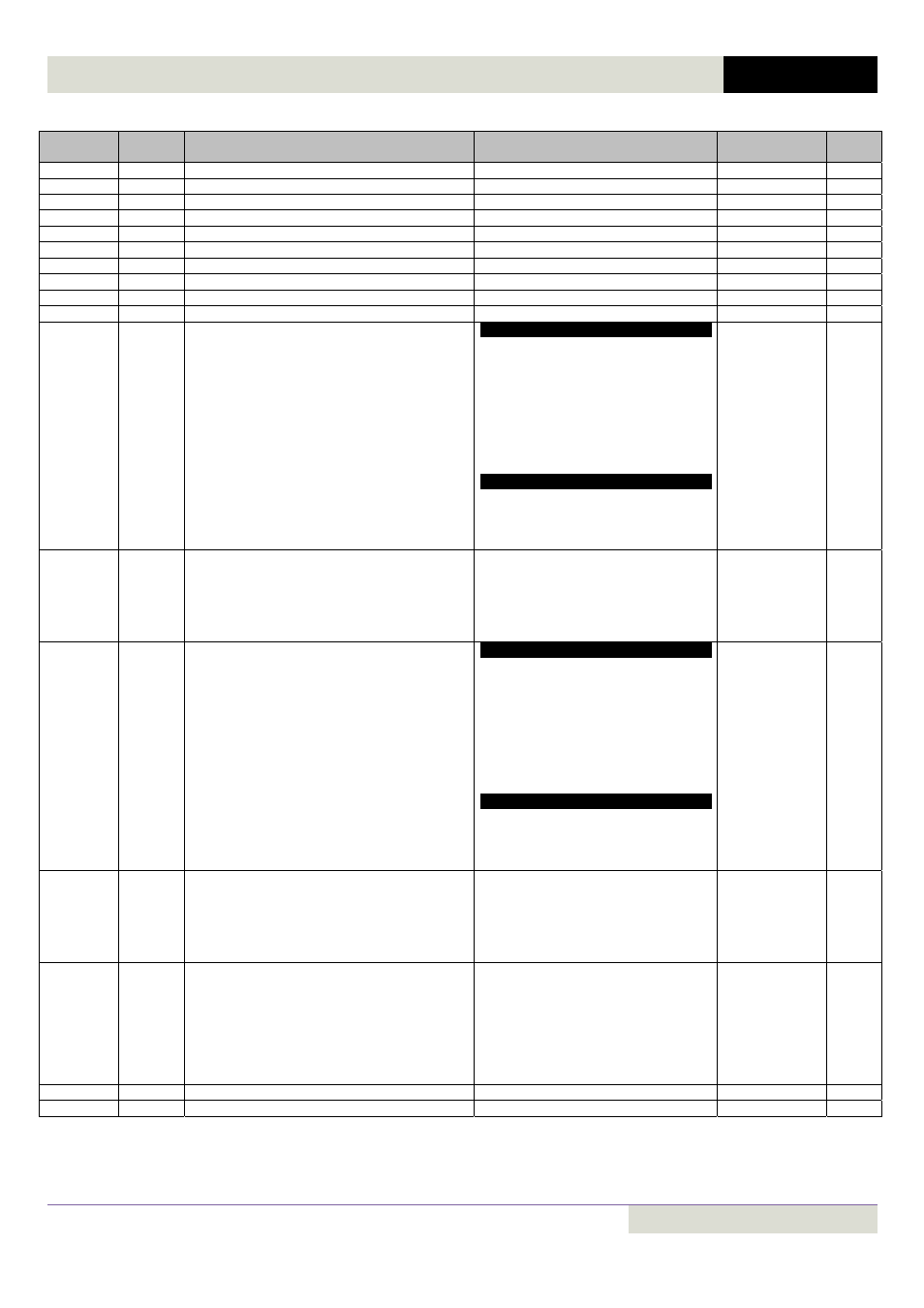
Group 2 : Extended parameter set (Level 2)
Parameter
Number
Register
Number
Description
Range
Scaling
Type
P2‐01
201
Preset speed 1
0 to 30000 (Limited by P1‐01 Setting)
3000 = 50.0Hz
U16
P2‐02
202
Preset speed 2
0 to 30000 (Limited by P1‐01 Setting)
3000 = 50.0Hz
U16
P2‐03
203
Preset speed 3
0 to 30000 (Limited by P1‐01 Setting)
3000 = 50.0Hz
U16
P2‐04
204
Preset speed 4
0 to 30000 (Limited by P1‐01 Setting)
3000 = 50.0Hz
U16
P2‐05
205
Preset speed 5
0 to 30000 (Limited by P1‐01 Setting)
3000 = 50.0Hz
U16
P2‐06
206
Preset speed 6
0 to 30000 (Limited by P1‐01 Setting)
3000 = 50.0Hz
U16
P2‐07
207
Preset speed 7
0 to 30000 (Limited by P1‐01 Setting)
3000 = 50.0Hz
U16
P2‐08
208
Preset speed 8
0 to 30000 (Limited by P1‐01 Setting)
3000 = 50.0Hz
U16
P2‐09
209
Skip frequency centrepoint
0 to 30000 (Limited by P1‐01 Setting)
3000 = 50.0Hz
U16
P2‐10
210
Skip frequency band
0 to 30000 (Limited by P1‐01 Setting)
3000 = 50.0Hz
U16
P2‐11
211
Analog output 1 function select
Digital Mode (0V or 24V only)
0: Drive running
1: Drive healthy
2: Motor at target speed
3: Motor Speed > 0
4: Motor Speed > limit
5: Motor Current > limit
6: Motor Torque > limit
7: 2
nd
Analog input > limit
(Limit set by P2‐18, P2‐19)
Analog Mode
8: Speed
9: Current
10: Torque
11: Power
U16
P2‐12
212
Analog output 1 format
0 = 0…10V
1 = 10…0V
2 = 0‐20mA
3 = 20‐0mA
4 = 4‐20mA
5 = 20‐4mA
U16
P2‐13
213
Analog output 2 function select
Digital Mode (0V or 24V only)
0: Drive running
1: Drive healthy
2: Motor at target speed
3: Motor Speed > 0
4: Motor Speed > limit
5: Motor Current > limit
6: Motor Torque > limit
7: 2
nd
Analog input > limit
(Limit set by P2‐18, P2‐19)
Analog Mode
8: Speed
9: Current
10: Torque
11: Power
U16
P2‐14
214
Analog output 2 format
0 = 0…10V
1 = 10…0V
2 = 0‐20mA
3 = 20‐0mA
4 = 4‐20mA
5 = 20‐4mA
U16
P2‐15
215
User relay 1 output function select
0: Drive running
1: Drive healthy
2: Motor at target speed
3: Motor Speed > 0
4: Motor Speed > limit
5: Motor Current > limit
6: Motor Torque > limit
7: 2
nd
Analog input > limit
U16
P2‐16
216
User relay 1 upper limit
P2‐17 to 2000
1 = 0.1%
U16
P2‐17
217
User relay 1 lower limit
0 to P2‐16
1 = 0.1%
U16