Ol2258 high speed pulse counter cont’d – Nematron OptiLogic Series User Manual
Page 27
Optimation, Inc.
(256)883-3050
27
OptiLogic Series
OL2258 High Speed Pulse Counter cont’d
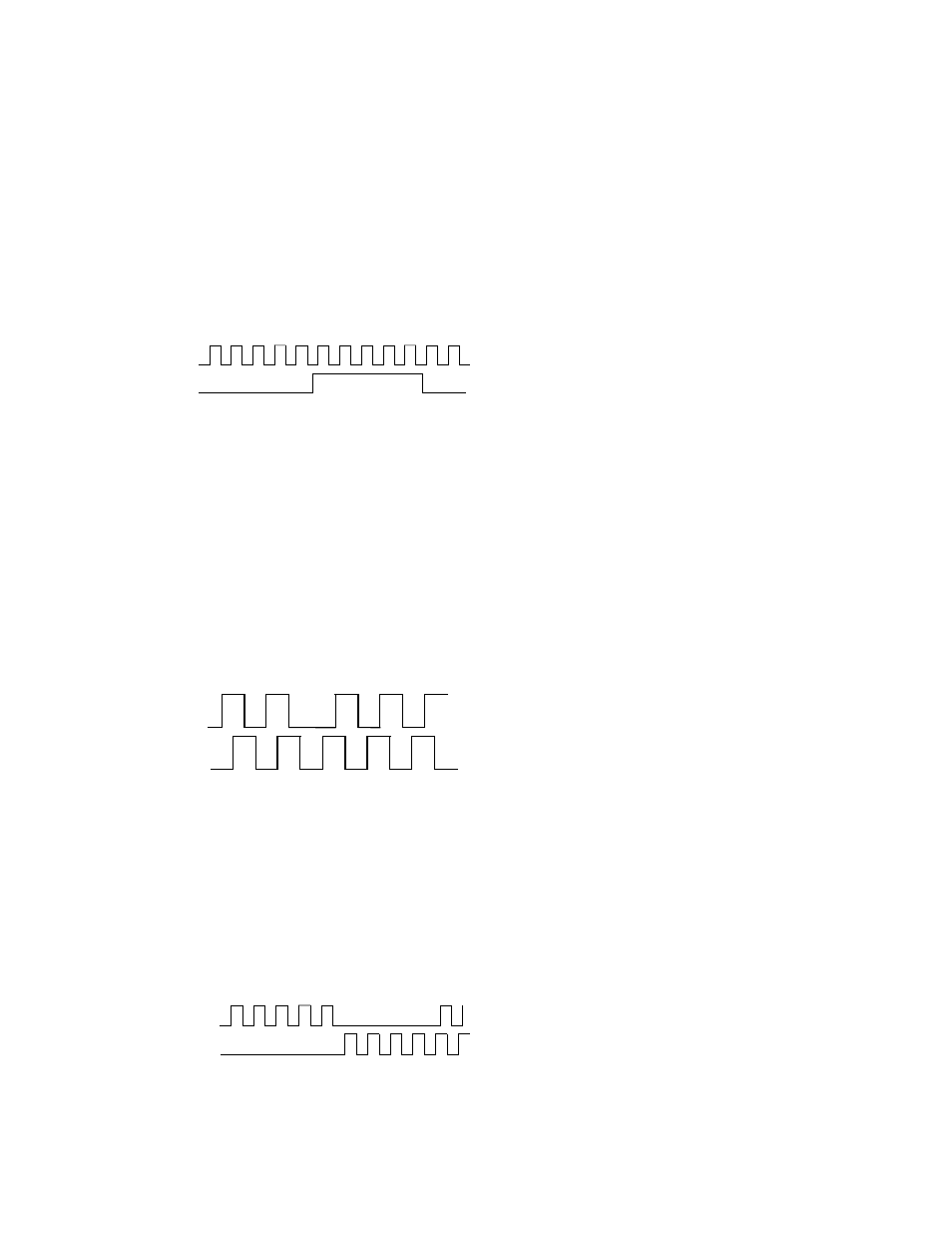
Pulse and Direction
In this configuration, pulses are input to
“A”. The counter direction is controlled by input
“B”. The operation is illustrated below.
Quadrature Encoder Input
The counting process for quadrature type
encoding is determined by the phase angle
between input A and input B. If A leads B, the
counter increments. If B leads A, the counter
decrements. The count is incremented or
decremented on each pulse transition as shown
below.
Up/Down Count
For this type of configuration, the count
increments on pulses input to
“A” and
decrements on pulses input to
“B”. This is
illustrated in the figure below.
Z and LS Presetting
The count can be preset to a value that
you define based on either or both inputs LS and
Z. It can also be forced to a preset value on
command via a message.
Through the configuration message, the
counter can be set up to force a preset value
when Z is active, LS is active, both Z and LS are
active or on software command.
Output Control
The two open collector outputs can each
be progammed to trigger within a programmable
(via an ethernet message) count range. This
range can be changed at any time via a
“Send
Output Range
” message, effectively providing
and unlimited number of ranges, under user
program control.
Outputs will trigger within immediately,
when the count enters the related range.
Frequency Measurement
Frequency data can be read back as a 16
bit signed integer value. The value will
correspond to the most recent 1 second or 200
millisecond (configurable) pulse count.
Pulse & Direction Count
Pulse (A)
Direction (B)
Count
1
2
3
4
5
4
3
2
1
0
1
2
Quadrature Count
Pulse (A)
Pulse (B)
Count
1
7
-1
2
6
-2
3
5
-3
4
4
5
3
6
2
7
1
8
0
Up/Down Count
Up Pulse (A)
Down Pulse (B)
Count
1
2
3
4
5
4
3
2
1
0
0
1
1