KB Electronics KBRC-240D User Manual
Page 20
output (RACC also sets the forward deceleration time). To increase the reverse acceler-
ation time, rotate the RACC trimpot clockwise. To decrease the reverse acceleration
time, rotate the RACC trimpot counterclockwise.
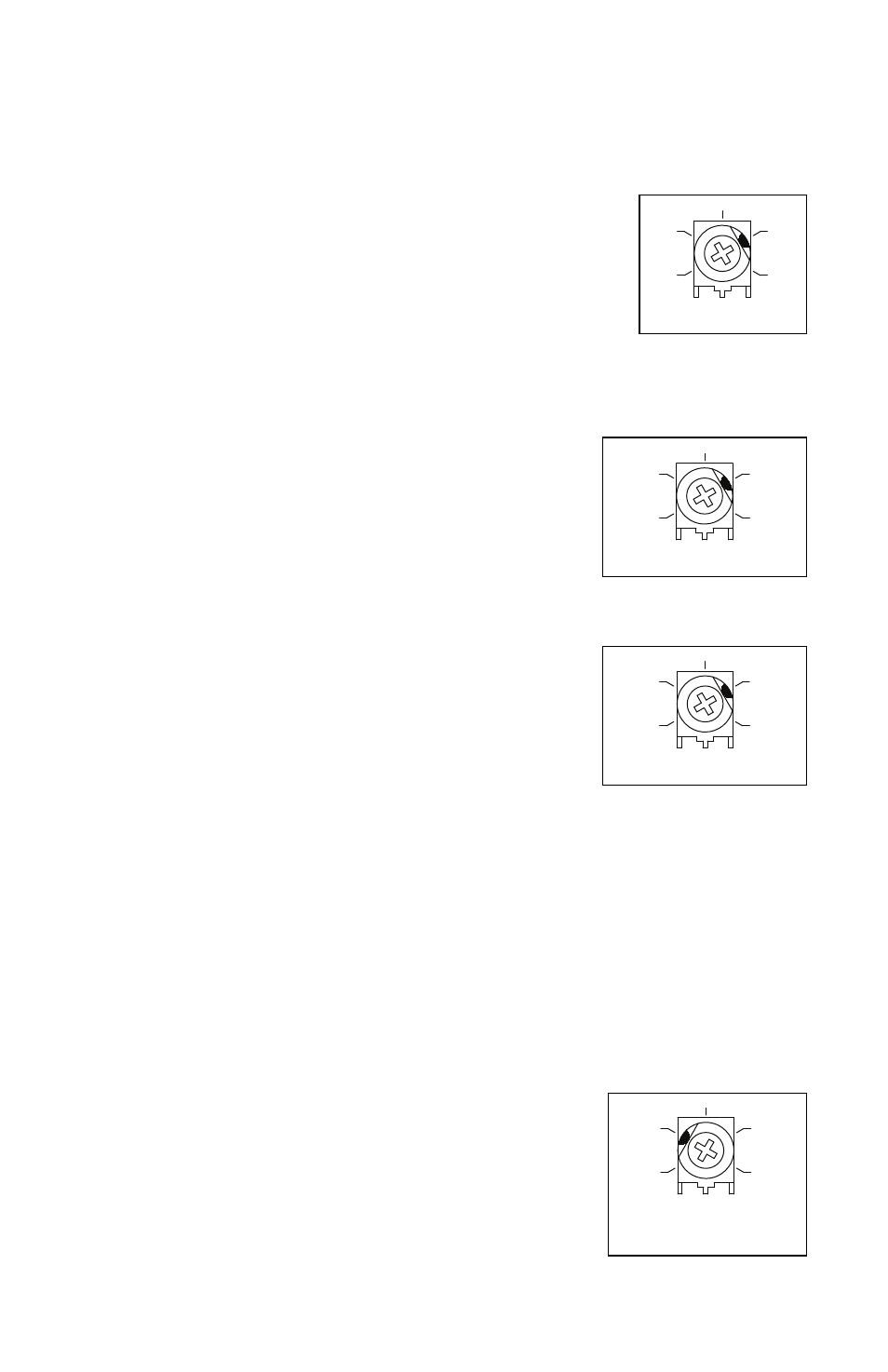
C. Maximum Speed (MAX) – Sets maximum speed of the motor.
The MAX trimpot is factory set for 100% of base motor speed.
For a higher maximum speed setting, rotate the MAX trimpot
clockwise. For a lower maximum speed setting, rotate the MAX
trimpot counterclockwise. See Figure 36.
To Calibrate the MAX Trimpot:
1. Adjust the MAX trimpot to the desired position and set the
Main Speed Potentiometer for full output voltage.
2. Monitor the armature voltage and readjust the MAX trimpot
to the desired voltage.
D. Forward Current Limit (FWDCL) and Reverse Current
Limit (REVCL) – Sets the current limit (overload), which
limits the maximum current to the motor. The FWDCL and
REVCL trimpots are factory set for 150% of J4 range set-
ting. See Figure 37 and Figure 38.
The FACC trimpot sets the current limit in the forward direc-
tion. To increase the forward current limit, rotate the
FWDCL trimpot clockwise. To decrease the forward cur-
rent limit, rotate the FWDCL trimpot counterclockwise.
The RACC trimpot sets the current limit in the reverse
direction. To increase the reverse current limit, rotate the
REVCL trimpot clockwise. To decrease the reverse current
limit, rotate the REVCL trimpot counterclockwise.
CAUTION! Adjusting the FWDCL or REVCL above 150%
of motor rating can cause overheating and demagnetiza-
tion of some PM motors. Consult the motor manufacturer.
Do not leave the motor in a locked condition for more than
a few seconds since armature damage may occur.
To Calibrate the FWDCL or REVCL Trimpot:
1. Disconnect the AC power. Wire in a DC ammeter in series with either motor armature
lead. Lock motor shaft. Be sure that Jumper J4 is set to the corresponding motor cur-
rent position. Set Jumper J8 to the “NTCL” position.
2. Set the FWDCL trimpot (if in the forward direction) or the REVCL trimpot (if in the
reverse direction) fully counterclockwise.
3. Apply power. Adjust the FWDCL trimpot (if in the forward direction) or the REVCL
trimpot (if in the reverse direction) until the desired current limit (CL) setting is
reached.
WARNING! Do not leave the motor shaft locked for more than 2 - 3 seconds or motor
damage may result.
E. IR Compensation (IR) – Sets the amount of compensating
voltage required to keep the motor speed constant under
changing loads. The IR trimpot is factory set for 10 Volts (at
180 Volts DC output) and 5 Volts (at 90 Volts DC output).
For higher compensating voltage, rotate the IR trimpot
clockwise. For lower compensating voltage, rotate the IR
trimpot counterclockwise. See Figure 39.
20
90
100
110
PERCENT OF BASE SPEED
70
80
(SHOWN FACTORY SET TO 100%)
FIGURE 36 – MAX
TRIMPOT RANGE
200
150
100
0
50
PERCENT OF JUMPER J4 RANGE SETTING
(SHOWN FACTORY SET TO 150%)
FIGURE 37 – FWDCL
TRIMPOT RANGE
100
150
200
PERCENT OF JUMPER J4 RANGE SETTING
0
50
(SHOWN FACTORY SET TO 150%)
FIGURE 38 – REVCL
TRIMPOT RANGE
AND 5 VOLTS AT 90 VOLTS DC OUTPUT)
7.5, 15
10, 20
15, 30
VOLTS
0
5, 10
(SHOWN FACTORY SET TO 10 VOLT
AT 180 VOLTS DC OUTPUT
FIGURE 39 – IR
TRIMPOT RANGE