PASCO ME-6964 PAStrack Wheel Set User Manual
Page 3
®
M o d e l N o . M E - 6 9 6 4
S u g g e s t e d A c t i v i t i e s
3
Dynamics Track Mount; a similar arrangement can be achieved with a rod stand,
right-angle clamp, and horizontal support rod.)
2.
Plug the Time Pulse Accessory into the EXT. INPUT jack on the Motorized Cart.
3.
Set the switch on the cart to ON (Batt.), and turn speed knob to maximum (full
clockwise).
4.
Set the rotary switch on the Time Pulse Accessory to position 3, the variable-time
setting.
5.
Place the cart at one end of the PAStrack with wheels and press the START but-
ton on the Time Pulse Accessory; after a two second delay the cart will drive for
a few seconds and stop automatically. Adjust the variable-time knob so that the
cart drives nearly the full length of the PAStrack with wheels without falling off
the end. (It is not necessary to let the PAStrack with wheels move freely for this
step.)
6.
Set the sample rates of both sensors to 20 Hz. Record some trial data runs and
adjust the positions and angles of the sensors to get clear position and velocity
data.
Calculations Setup
For
more information about creating calculations in DataStudio, click the Calculate button, then
press F1 (Windows) or the Help key (Mac).
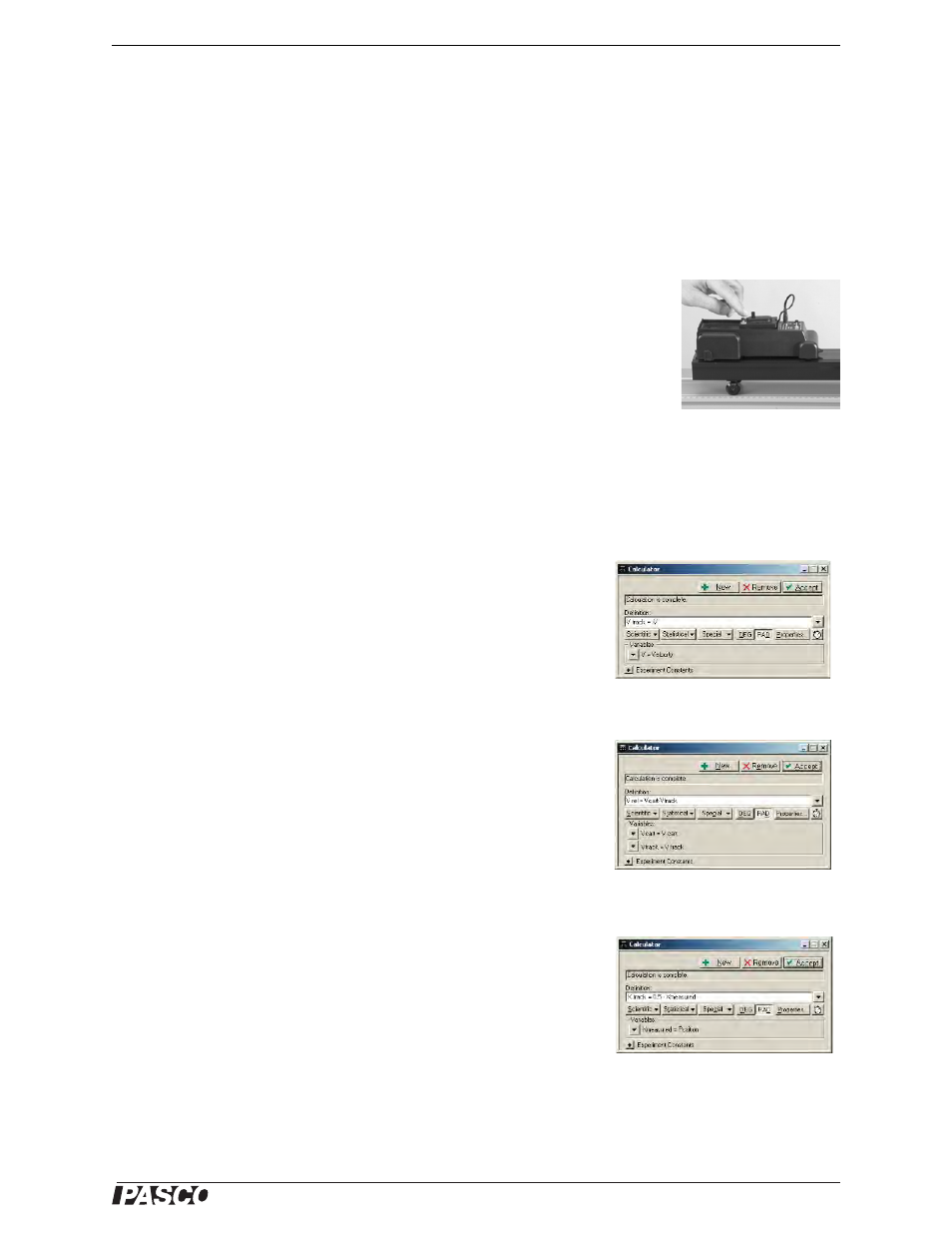
1.
Since the sensors are facing in opposite directions, it is necessary to
create a calculation that reverses the velocity measurement of the
right-hand sensor; that way both sensors will register movement from
left to right as positive. In DataStudio, create the calculation
Vtrack
=
−
V
where
V
is the measured velocity.
2.
Create a second calculation for the velocity of the cart relative to the
PAStrack with wheels:
Vrel
=
Vcart
−
Vtrack
where
Vcart
is the measurement made by the left-hand sensor and
Vtrack
is the previous calculation.
3.
(This step is optional.) If you plan to use this arrangement of sensors for other
experiments in which you will compare the positions of the cart and
PAStrack with wheels, create a calculation to transform the position
measurement made by the right-hand sensor:
x
track
= 0.5
− x
measured
where x
measured
is the measurement made directly by the right-hand
sensor. The number 0.5 is the difference (in meters) between the
length of the PAStrack with wheels and the distance between the
sensors, which may be different in your setup. This calculation will make the
readings from both sensor identical when the back of the cart is even with the left
end of the PAStrack with wheels.