Sample data – PASCO ME-8092 Force Distribution Apparatus User Manual
Page 6
®
F o r c e D i s t r ib u t i o n A p p a r a t u s
S a m p l e D a t a
6
Sample Data
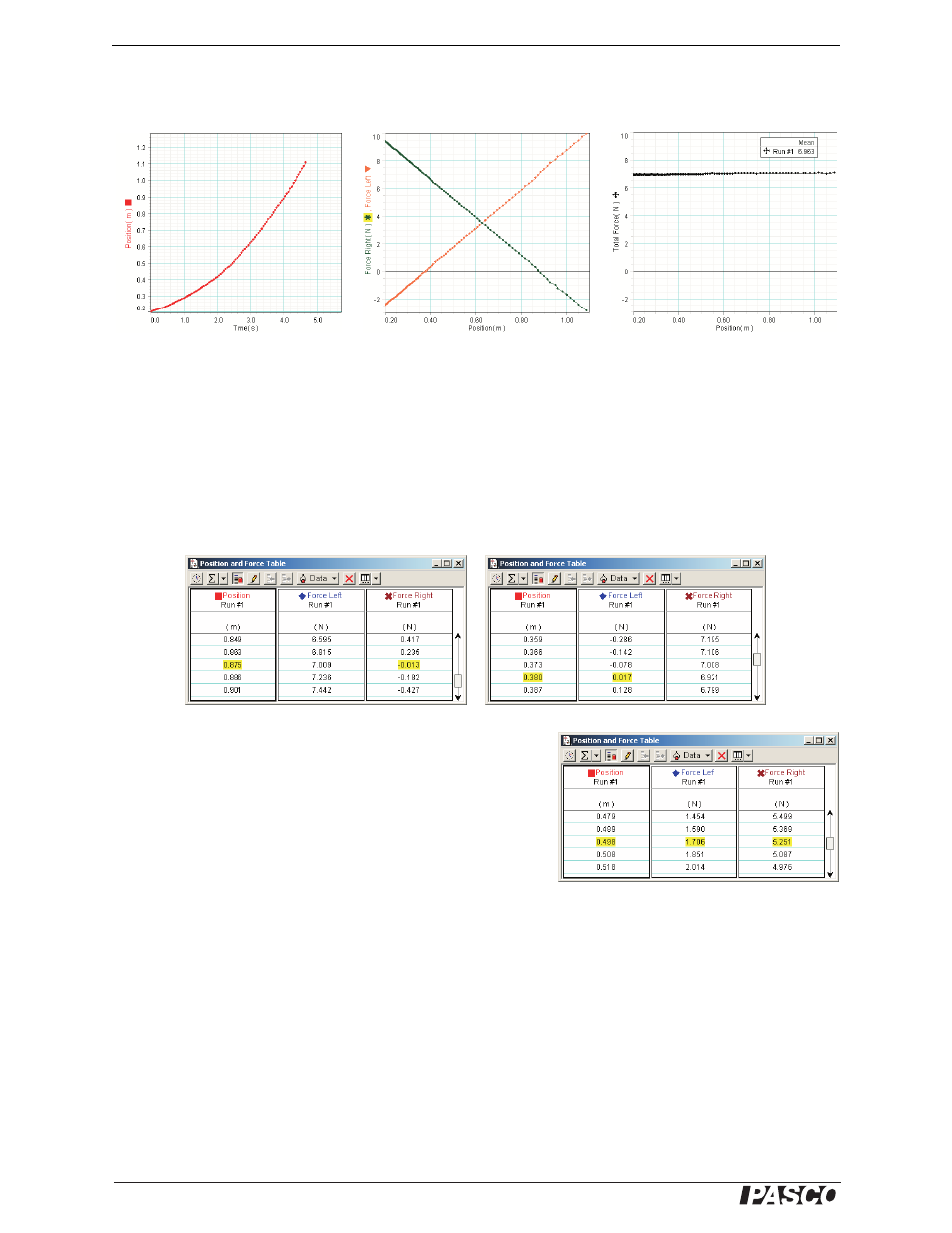
The graphs above are Position vs. time as ball rolls (left), the forces measured by each
sensor versus ball position (center), and the sum of the measured forces versus ball
position (right). When the ball is not between the sensors, the force measured by one
of the sensors is negative. The sum of the measured forces equals the weight of the
ball. The weight of the beam was zeroed out and does not contribute to the measured
forces.
The table below on the left shows that the left sensor is 0.88 m from the motion sensor
and the right table shows that the right sensor is 0.38 m from the motion sensor.
In this example, the point chosen for analysis is where the ball
was 0.498 m from the motion sensor. This gives the values of
F
left
= 1.7 N
τ
left
= rF = (0.88 m)(1.7 N) = 1.5 N·m
F
right
= 5.3 N
τ
right
= (0.380 m)(5.3 N) = 2.0 N·m
τ
ball
= (0.50 m)(7.0 N) = 3.5 N·m
Note that the weight of the ball tends to make the beam rotate counterclockwise (as
measured from the motion sensor) but the two force sensors tends to make it rotate
clockwise.
Total clockwise torque = 1.5 N·m + 2.0 N·m = 3.5 N·m
Total counterclockwise torque = 3.5 N·m
Since these two torques are in opposite directions, they have opposite signs, thus the
total net torque is zero.