PASCO CI-6746 ECONOMY FORCE SENSOR User Manual
Page 3
012-06906B
Economy Force Sensor
®
3
Calibrating the Economy Force Sensor
The Economy Force Sensor is designed to produce
approximately zero volts when it is “zeroed”. A
change in force of one newton causes a change in
output voltage of 160 millivolts (0.160 V);
therefore, the sensor does not need to be
calibrated. Instead, the voltage can be converted
directly into force. For example, after the sensor is
“zeroed”, an output voltage of 0.160 volts equals a
force of one newton, a voltage of 1.60 volts equals
a force of 10 newtons, and so on. In the same way,
a voltage of -1.60 volts equals a force of -10
newtons (in other words, a pull of 10 newtons).
However, you can calibrate the sensor to learn
about the process of calibration. All calibrations
assume that the sensor produces an output
voltage that is linear with respect to the input
signal. Calibration is done by setting up two
calibration situations (such as “no force” and a
known force), measuring the input signal in each
situation in comparison to a known standard,
and entering the readings.
General Calibration Procedure:
1. In your data acquisition software, open the
Force Sensor’s calibration dialog.
2. Place your Force Sensor in the lowest force
situation for which you are calibrating (such as,
no force).
3. Press the tare button to “zero” the Force Sensor.
4. In the calibration dialog, type the low value into
the LOW VALUE text box, and click the
READ button.
5. Apply a known force to the Force Sensor (for
example, hang a mass of known weight from
the detachable hook). This force should be
approximately that of the highest force you plan
to measure.
6. Type the value for the applied force in the
HIGH VALUE text box, and click the READ
button.
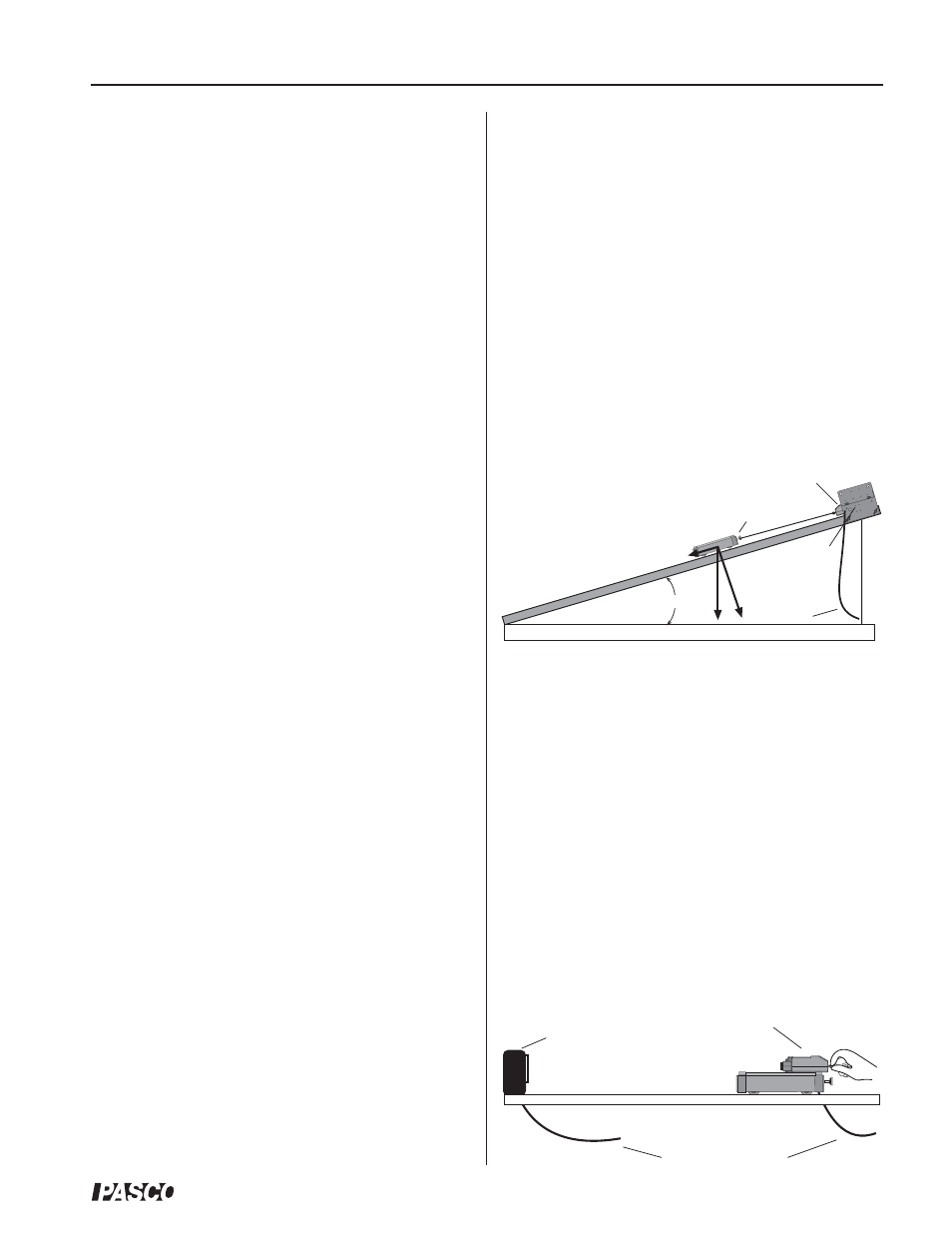
Suggested Experiments
Component of Force on an Inclined Plane
When a cart is at rest on an inclined plane, the
component of force acting on the cart that is
parallel to the plane is mgsin
θ
, where mg is the
weight of the cart and
θ
is the angle of the plane.
Use the sensor to measure the weight of a
Dynamics Cart. Mount the sensor at the high end
of the inclined Dynamics Track using an
Accessory Bracket (CI-6545), and connect it to a
Dynamics Cart on the track with a string. Measure
the angle of the track. Measure the tension in the
string, and compare this to the theoretical value
mgsin
θ
.
Newton’s Second Law: Pushing and Pulling a
Cart
When an object is accelerated by a net force, the
acceleration is directly proportional to the net force
and inversely proportional to the object’s mass.
Mount the Force Sensor onto a Dynamics Cart.
Use a Motion Sensor to measure the velocity and
acceleration of the cart. Zero the Force Sensor.
Hold the hook on the front of the Force Sensor,
and move the cart gently but irregularly back and
forth in front of the Motion Sensor. Use the
computer program to compare the measured force
to the measured velocity and acceleration.
Motion Sensor
to computer interface
Dyanmics Cart
Dynamics Track
Force Sensor
q
Dynamics
Cart
to computer
interface
Force Sensor
Dynamics Track
mgcos
θ
mg
mgsin
θ
Accessory
Bracket