5 sinusoidal vs trapezoidal – CONTREX CXB2040 User Manual
Page 18
8900 Zachary Lane N., Maple Grove, MN 55369 U.S.A.
15
CHAPTER 2: THEORY OF OPERATION
BRUSHLESS MOTORS/AMPLIFIERS
BRUSHED MOTORS/AMPLIFIERS
ADVANTAGES
DISADVANTAGES
No scheduled maintenance and no brush dust is
generated.
Motor brushes must be checked periodically for
wear and excess brush dust.
Higher RPM limits. Approximately 3000RPM maximum.
Lower inertia/torque ratio.
Higher inertia to torque ratio.
Dissipates heat more efficiently due to windings
being located in stator.
Not as efficient at dissipating heat. Heat is trapped
at rotor and shortens bearing life.
Safer for explosive atmospheres. Quieter and less
electrical noise generated.
Brushes spark and generate electrical and audible
noise.
DISADVANTAGES
ADVANTAGES
Amplifiers are complicated and expensive.
Amplifiers are simpler and less expensive.
Higher torque ripple.
Lower torque ripple.
No Industry standard packaging.
Industry standard packaging.
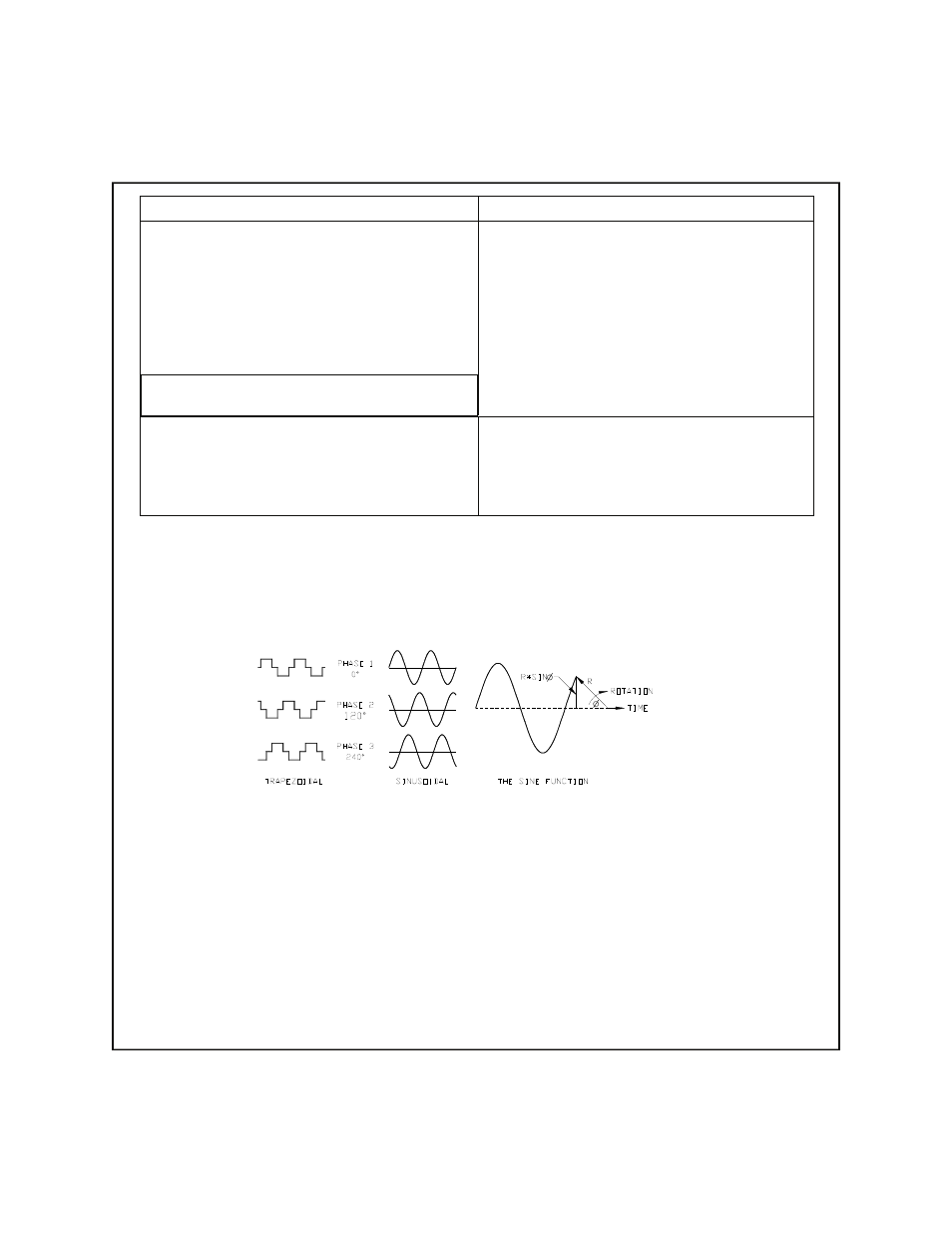
2.5 SINUSOIDAL vs. TRAPEZOIDAL:
Figure 2.4 shows the two most common waveforms used to drive a brushless motor. Note that in
each case, there are actually three different waveforms. Each waveform drives a motor winding and is
120
o
out-of-phase with the other two. Again, the waveform may be generated from a DC source by linear
or PWM techniques.
Figure 2.4
Trapezoidal and sinusoidal waveform used to drive brushless motor.
The first waveform is known as trapezoidal or six-step since the voltage is literally stepped from
winding to winding (like the Christmas-light analogy). This is the simplest and least expensive method of
driving a brushless motor. Its principal disadvantage is that the large current steps produce high torque
ripple. (Torque ripple is a repetitive fluctuation in torque as the motor turns and is independent of load.)
The second waveform is known as sinusoidal. To minimize torque ripple, the motor current needs to
be constantly varied according to the orientation of the magnets and windings. As it happens, this is a
sine function. In fact, a sine wave is defined as a rotating radius (like a motor shaft) revolving through
time (see figure 2.4). A sine wave is the most natural way to drive a motor and produces the minimum
torque ripple.