Update cycle, 2 + t – Rainbow Electronics DS1687 User Manual
Page 18
DS1685/DS1687
18 of 38
UPDATE CYCLE
The serialized RTC executes an update cycle once per second regardless of the SET bit in Register B.
When the SET bit in Register B is set to 1, the user copy of the double-buffered time, calendar, alarm,
and elapsed time byte is frozen and does not update as the time increments. However, the time countdown
chain continues to update the internal copy of the buffer. This feature allows the time to maintain
accuracy independent of reading or writing the time, calendar, and alarm buffers and also guarantees that
time and calendar information is consistent. The update cycle also compares each alarm byte with the
corresponding time byte and issues an alarm if a match or if a “don’t care” code is present in all alarm
locations.
There are three methods that can handle access of the RTC that avoid any possibility of accessing
inconsistent time and calendar data. The first method uses the update-ended interrupt. If enabled, an
interrupt occurs after every update cycle that indicates that over 999ms are available to read valid time
and date information. If this interrupt is used, the IRQF bit in Register C should be cleared before leaving
the interrupt routine.
A second method uses the UIP bit in Register A to determine if the update cycle is in progress. The UIP
bit pulses once per second. After the UIP bit goes high, the update transfer occurs 244µs later. If a low is
read on the UIP bit, the user has at least 244µs before the time/calendar data is changed. Therefore, the
user should avoid interrupt service routines that would cause the time needed to read valid time/calendar
data to exceed 244µs.
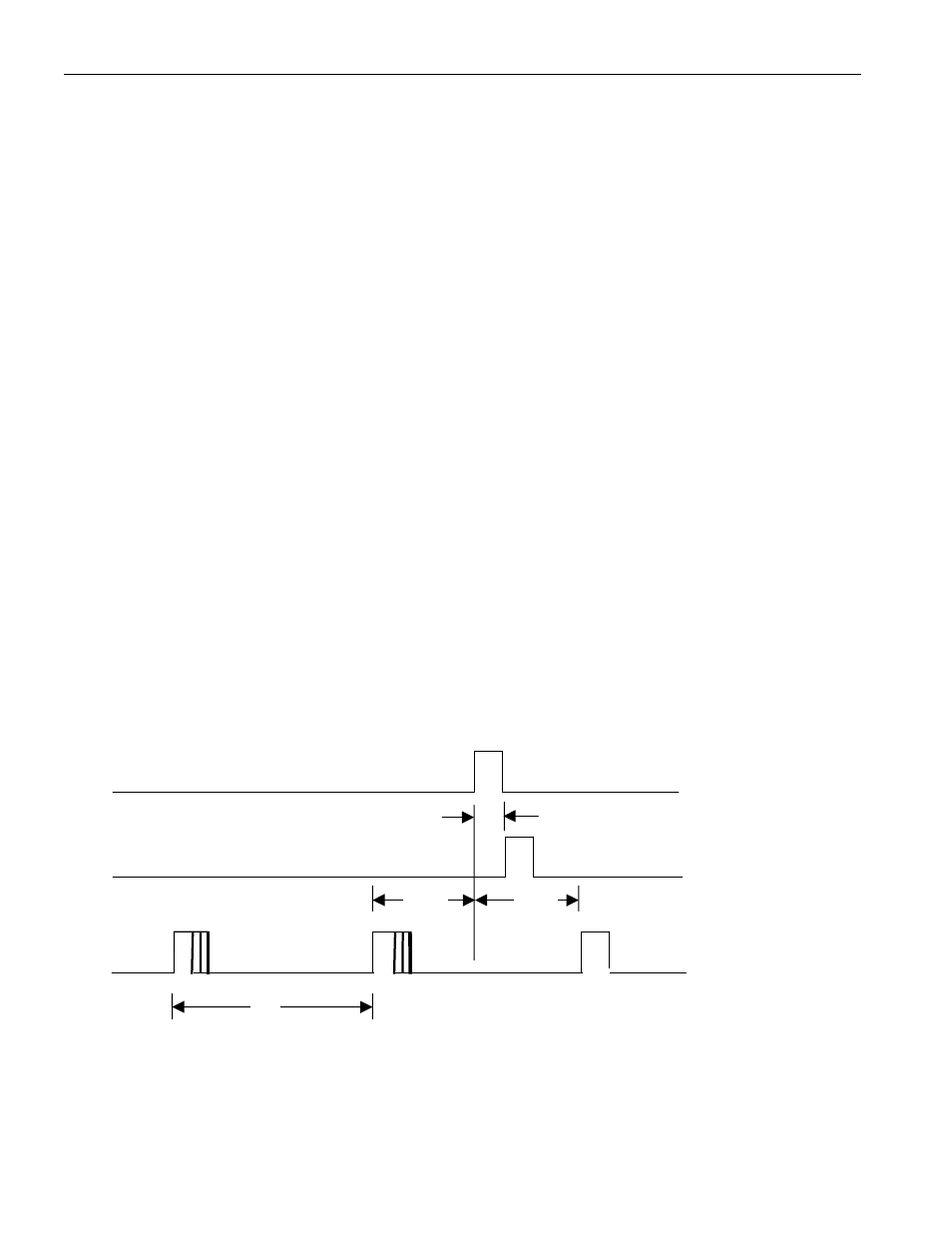
The third method uses a periodic interrupt to determine if an update cycle is in progress. The UIP bit in
Register A is set high between the setting of the PF bit in Register C (Figure 3). Periodic interrupts that
occur at a rate of greater than t
BUC
allow valid time and date information to be reached at each occurrence
of the periodic interrupt. The reads should be complete within (t
PI
/ 2 + t
BUC
) to ensure that data is not
read during the update cycle.
Figure 3. UPDATE-ENDED AND PERIODIC-INTERRUPT RELATIONSHIP
t
t
P1/2
t
P1/2
t
BUC
UIP BIT IN
REGISTER A
UF BIT IN
REGISTER C
PF BIT IN
REGISTER C
t
PI
= PERIODIC INTERRUPT TIME INTERNAL PER TABLE 1
t
BUC
= DELAY TIME BEFORE UPDATE CYCLE = 244µs