Rainbow Electronics MAX8709 User Manual
Page 17
MAX8709
High-Efficiency CCFL Backlight
Controller with SMBus Interface
______________________________________________________________________________________
17
If the transmission is completed correctly, the registers
are updated immediately after a STOP (or RESTART)
condition. If the MAX8709 receives its correct slave
address followed by R/W = 1, it expects to clock out the
register data selected by the previous command byte.
SMBus Commands
The MAX8709 registers are accessible through several
different redundant commands (i.e., the command byte
in the read-byte and write-byte protocols), which can
be used to read or write the brightness, SHMD, status,
or ID registers.
Table 3 summarizes the command byte’s register
assignments, as well as each register’s power-on state.
The MAX8709 also supports the receive-byte protocol
for quicker data transfers. This protocol accesses the
register configuration pointed to by the last command
byte. Immediately after power-up, the data byte
returned by the receive-byte protocol is the inverted
contents of the brightness register, left justified (i.e.,
BRIGHT4 is in the most-significant-bit position of the
data byte) with the 3 remaining bits containing a one,
STATUS1, and STATUS0. This gives the same result as
using the read-word protocol with 0b10XXXXXX (0xAA
and 0xA9) command. Use caution with the shorter pro-
tocols in multimaster systems, since a second master
could overwrite the command byte without informing
the first master. During shutdown the serial interface
remains fully functional.
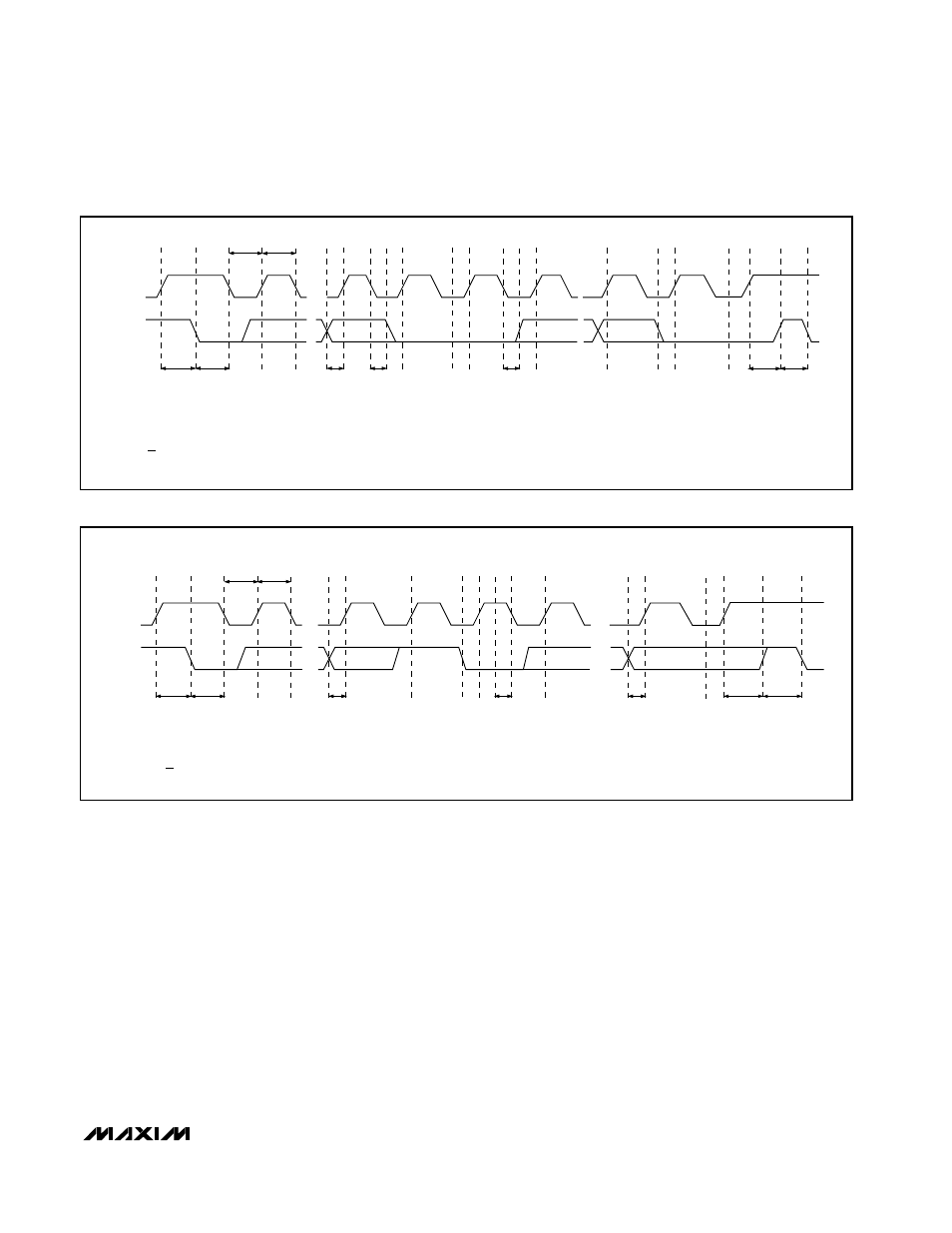
SMBCLK
A
B
C
D
E
F
G
H
I
J
K
SMBDATA
t
SU:STA
t
HD:STA
t
LOW
t
HIGH
t
SU:DAT
t
HD:DAT
t
HD:DAT
t
SU:STO
t
BUF
A = START CONDITION
B = MSB OF ADDRESS CLOCKED INTO SLAVE
C = LSB OF ADDRESS CLOCKED INTO SLAVE
D = R/W BIT CLOCKED INTO SLAVE
E = SLAVE PULLS SMBDATA LINE LOW
L
M
F = ACKNOWLEDGE BIT CLOCKED INTO MASTER
G = MSB OF DATA CLOCKED INTO SLAVE
H = LSB OF DATA CLOCKED INTO SLAVE
I = SLAVE PULLS SMBDATA LINE LOW
J = ACKNOWLEDGE CLOCKED INTO MASTER
K = ACKNOWLEDGE CLOCK PULSE
L = STOP CONDITION, DATA EXECUTED BY SLAVE
M = NEW START CONDITION
Figure 8. SMBus Write Timing
SMBCLK
A = START CONDITION
B = MSB OF ADDRESS CLOCKED INTO SLAVE
C = LSB OF ADDRESS CLOCKED INTO SLAVE
D = R/W BIT CLOCKED INTO SLAVE
A
B
C
D
E
F
G
H
I
J
SMBDATA
t
SU:STA
t
HD:STA
t
LOW
t
HIGH
t
SU:DAT
t
HD:DAT
t
SU:DAT
t
SU:STO
t
BUF
K
E = SLAVE PULLS SMBDATA LINE LOW
F = ACKNOWLEDGE BIT CLOCKED INTO MASTER
G = MSB OF DATA CLOCKED INTO MASTER
H = LSB OF DATA CLOCKED INTO MASTER
I = ACKNOWLEDGE CLOCK PULSE
J = STOP CONDITION
K = NEW START CONDITION
Figure 9. SMBus Read Timing