Pin description (continued) – Rainbow Electronics MAX8707 User Manual
Page 15
MAX8707
Multiphase, Fixed-Frequency Controller for
AMD Hammer CPU Core Power Supplies
______________________________________________________________________________________
15
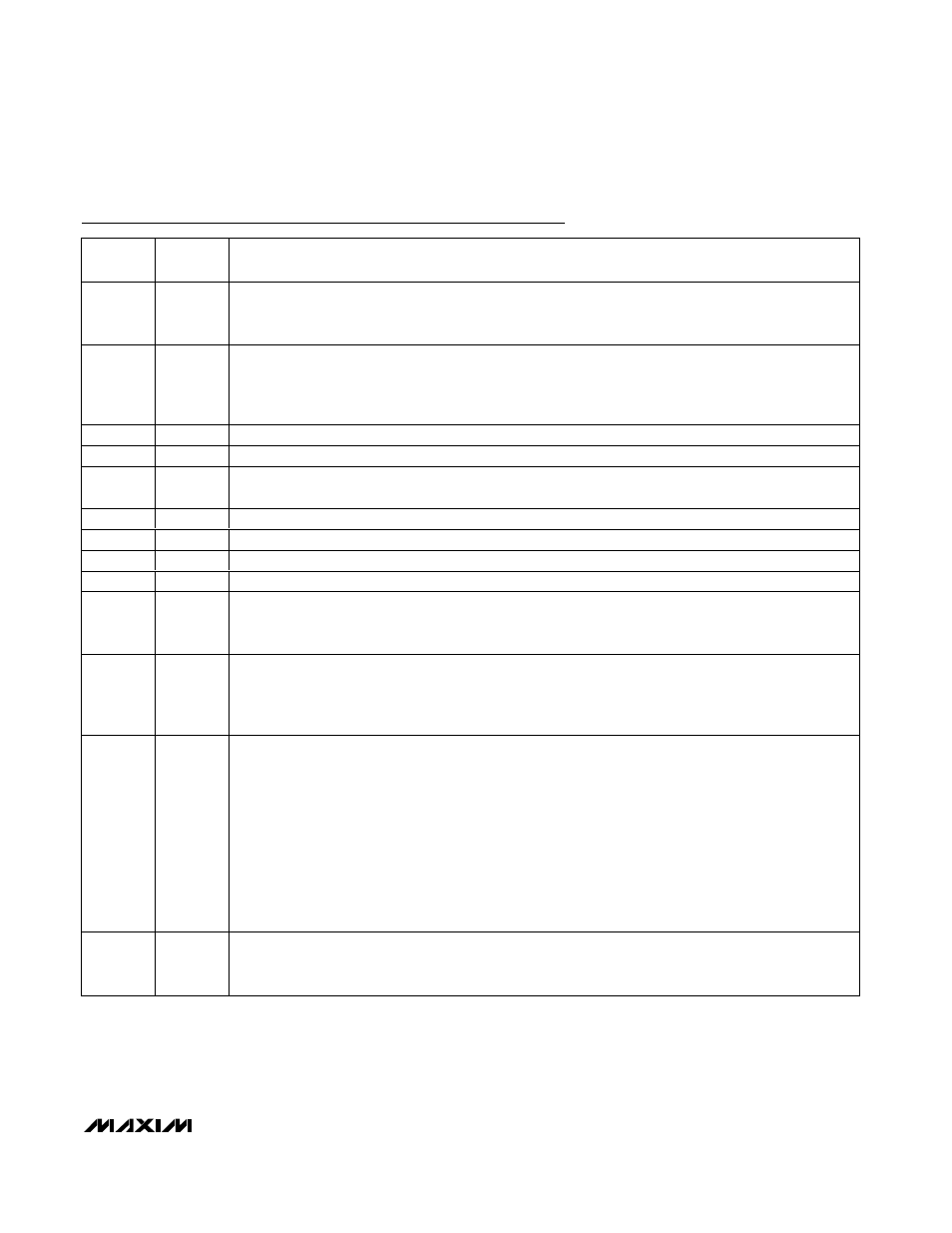
Pin Description (continued)
PIN
NAME
FUNCTION
17
REF
2.0V Reference Output. Bypass to GND with a 0.22µF to 1µF (max) ceramic capacitor. The reference can
source 500µA for external loads. Loading REF degrades output-voltage accuracy according to the REF
load-regulation error.
18
VROK
Open-Drain Power-Good Output. After power-up, VROK remains high impedance as long as the output
voltage remains in regulation. The controller blanks VROK (high impedance) whenever the slew-rate
control is active (output-voltage transitions). VROK is forced low during startup and shutdown. In pulse-
skipping mode (SKIP = high), the upper VROK threshold is disabled.
19
GND
Analog Ground. Connect the MAX8707’s exposed pad to analog ground.
20
PGND
Power Ground. Ground connection for the driver control outputs (PWM_) and driver skip output (DRSKP).
21
V
CC
Analog Supply-Voltage Input. Connect V
CC
to the system supply voltage (4.5V to 5.5V) with a series 10
Ω
resistor. Bypass to analog GND with a 1µF or greater ceramic capacitor, as close to the IC as possible.
22
PWM1
PWM Driver Control Output for Phase 1. Logic low in shutdown.
23
PWM2
PWM Driver Control Output for Phase 2. Logic low in shutdown.
24
PWM3
PWM Driver Control Output for Phase 3. Logic low in shutdown.
25
PWM4
PWM Driver Control Output for Phase 4. Logic low when disabled (CSP4 = V
CC
) and in shutdown.
26
DRSKP
D r i ver S ki p C ontr ol Outp ut. P ush/p ul l l og i c outp ut that contr ol s the op er ati ng m od e of the ski p - m od e d r i ver IC s.
DRSKP sw i ng s fr om V
C C
to P GN D . When DRSKP i s hi g h, the d r i ver IC s op er ate i n for ced - P WM m od e. When
DRSKP i s l ow , the d r i ver IC s enab l e thei r zer o- cr ossi ng com p ar ator s and op er ate i n p ul se- ski p p i ng m od e.
27
FBS
Remote Feedback Sense Input. Connect FBS to the CPU output sense point. To minimize output-voltage
errors due to any resistance in series with the FBS input, the controller generates an FBS input bias
current equal in magnitude and opposite in polarity to the VPS output current. FBS is high impedance
in shutdown.
28
VPS
Voltage-Positioning Transconductance-Amplifier Output. Connect a resistor R
VPS
between VPS and FBS to
set the DC steady-state droop (load line) based on the required voltage-positioning slope (see the
Voltage-Positioning Amplifier section).
R
VPS
= R
DROOP
/ (R
SENSE
x G
M(VPS)
)
where R
DROOP
is the desired DC voltage-positioning slope, R
SENSE
is the current-sense resistor, and
G
M(VPS)
= 200µS. R
SENSE
is the accurate sense resistor used to generate current-sense voltage (CRSP,
CRSN). When CRSP is connected to V
CC
, the input to the transconductance amplifier is the sum of the
current-sense voltage (CSP_, CSN_) inputs. When the inductors’ DC resistances (R
DCR
) are used as the
current-sense elements (for lossless sensing), R
VPS
should include an NTC thermistor to minimize the
temperature dependence of the voltage-positioning slope. To disable voltage positioning, short VPS to
FBS. VPS is high impedance in shutdown.
29
CRSN
Negative Current-Sense Resistor Input. CRSN is the negative differential input used for accurate sensing
of the phase 1 inductor current. Connect a current-sense resistor between CRSP and CRSN for accurate
voltage positioning and current limit. Float CRSN when not used (CRSP pulled up to V
CC
).