Sounds, Tcm2 – Pioneer 2TM User Manual
Page 52
ActivMedia Robotics Operating System
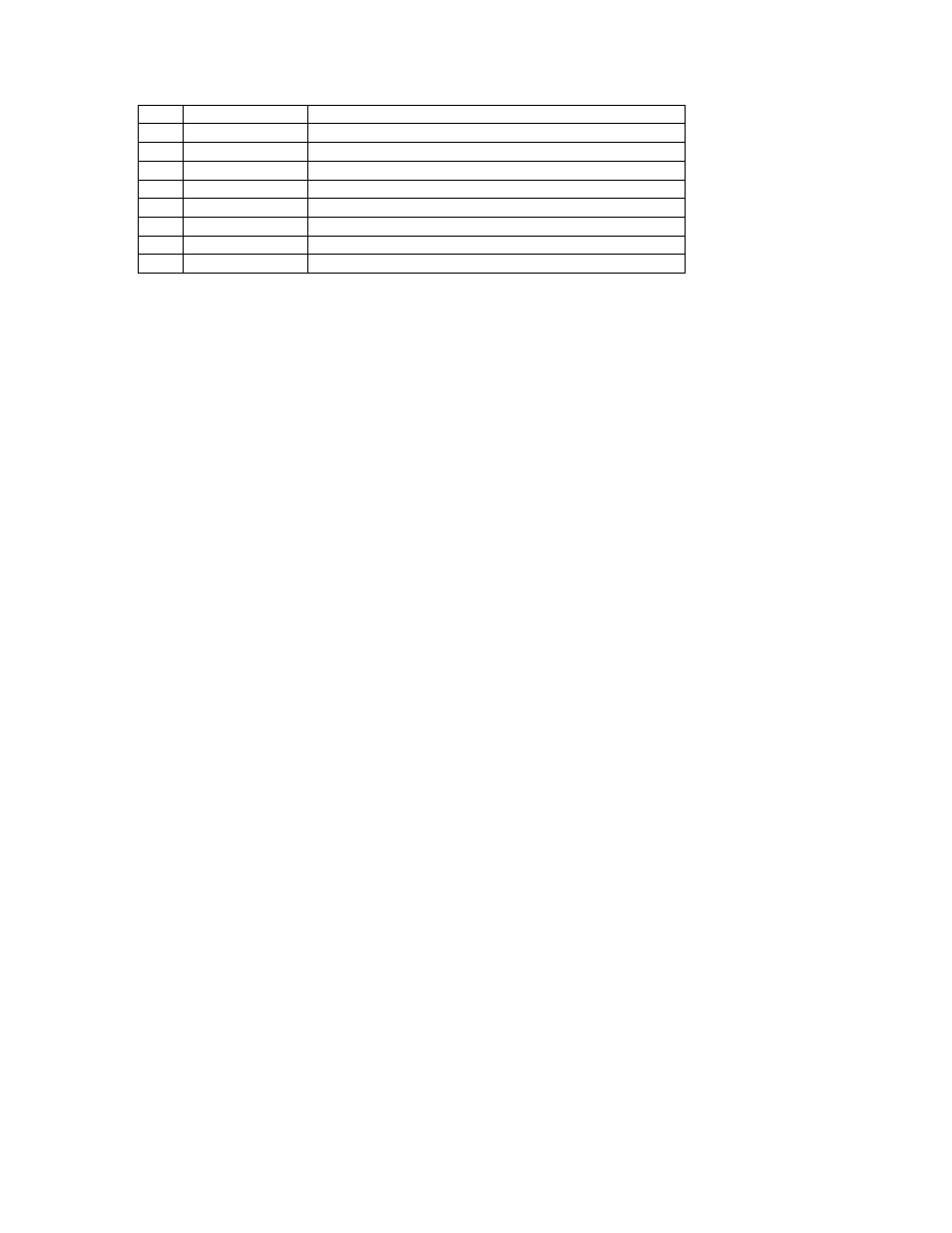
Table 11. GRIPPERpac state byte
BIT
FUNCTION
STATE
0
Grip limit
Paddles fully open when 0; otherwise between or closed
1
Lift limit
Lift fully up or down when 0; otherwise in between
2
Outer breakbeam Obstructed when 0; nothing in between when 1
3
Inner breakbeam Obstructed when 0; nothing in between when 1
4
Left paddle
Grasping when 0
5
Right paddle
Grasping when 0
6
Lift
Moving when 1
7
Gripper
Moving when 1
Note that the Gripper status information bits 0-5 also may be obtained from the
respective digin and digout values of the standard SIP as related to the User I/O port
states. See Appendix A for connection details.
Sounds
Unlike its ActivMedia robot cousins, the AmigoBot mobile robot has onboard sound
reproduction hardware and software that includes a playlist of contents. To support the
ActivMedia Robotics Interface for Applications (ARIA) that includes all ActivMedia’s
robots, we’ve included the PLAYLISTpac (type = 208; 0xD0) and PLAYLIST request
command 91 in AROS. We document the command and packet here for completeness,
but they have no effect on the operation or performance of your ActivMedia mobile
robot.
The AmigoBot sounds playlist consists of a series of one to 255 24-byte long sound
references, followed by individual sound data. Sound references may be NULL or
redundant.
Sound references consist of a 16-byte sound name followed by two long integers, which
specify the sound data position and length in the playlist. Upon receipt of the PLAYLIST
command 91 with any or no argument, AROS responds with a PLAYLISTpac SIP
containing 25 NULL bytes, telling the client that your AROS-based robot does not have
any onboard sounds.
Whereas the AmigoBot has a high-fidelity sound system, AROS- and P2OS-based robots
have a piezo buzzer that aurally notifies you of system conditions, such as low battery or
stalls. For stealthy operation, issue the SOUNTOG command number 92 with an
argument of zero to mute the controller’s buzzer; argument of one to re-enable it. (See
also the SOUNDTOG FLASH parameter in the next chapter to set its default state.)
The SAY command number 15 lets you play your own sounds through the buzzer. The
argument consists of a length-specified string of duration/frequency tone pair bytes. The
duration is measured in 20 millisecond increments. Frequencies are half-tones, limited by
the 8-bit timer. You’ll have to experiment with tones. Here is the sequence that
generates the AROS tone when the robot stalls (in octal):
\012\001\012\000\012\010\012\000\012\001
TCM2
The TCM2 accessory is an integrated inclinometer, magnetometer, thermometer, and
compass that attaches to one of the AUX serial ports of the AROS microcontroller. When
attached and enabled, special TCM2 compass servers read and report the heading as
the compass byte in the standard SIP. Use the TCM2 command 45 to request additional
information from the device in the form of the TCM2pac. See the TCM2 Manual and
supporting software that accompanies the device for details.
46