Demo startup options – Pioneer 2TM User Manual
Page 31
ActivMedia Robotics
needed), by starting and testing the robot, and by connecting the client PC with the
AROS controller via a serial link. Now it is time to connect the ARIA demonstration
program with your robot.
If you are using radio modems or the new Low-Speed Ethernet-to-serial device to
communicate wirelessly from a desktop PC to the robot controller, now is a good time to
power the units. The RADIO power switch for the integrated radio is on the User Control
Panel. The other radio modem should be attached to your PC and powered via the
module that came with the unit. If using the Ethernet-to-serial radio, be sure you have a
connection with a local access point, or have a peer-to-peer radio Ethernet installed in
your client computer.
Windows users may select the ARIA demo from the Start menu, in the ActivMedia
Robotics program group. Otherwise, start if from the ARIA bin\ directory.
Linux users will find the compiled demo in /usr/local/Aria/bin/ or in examples/. Start
it:
%
./demo
Demo Startup Options
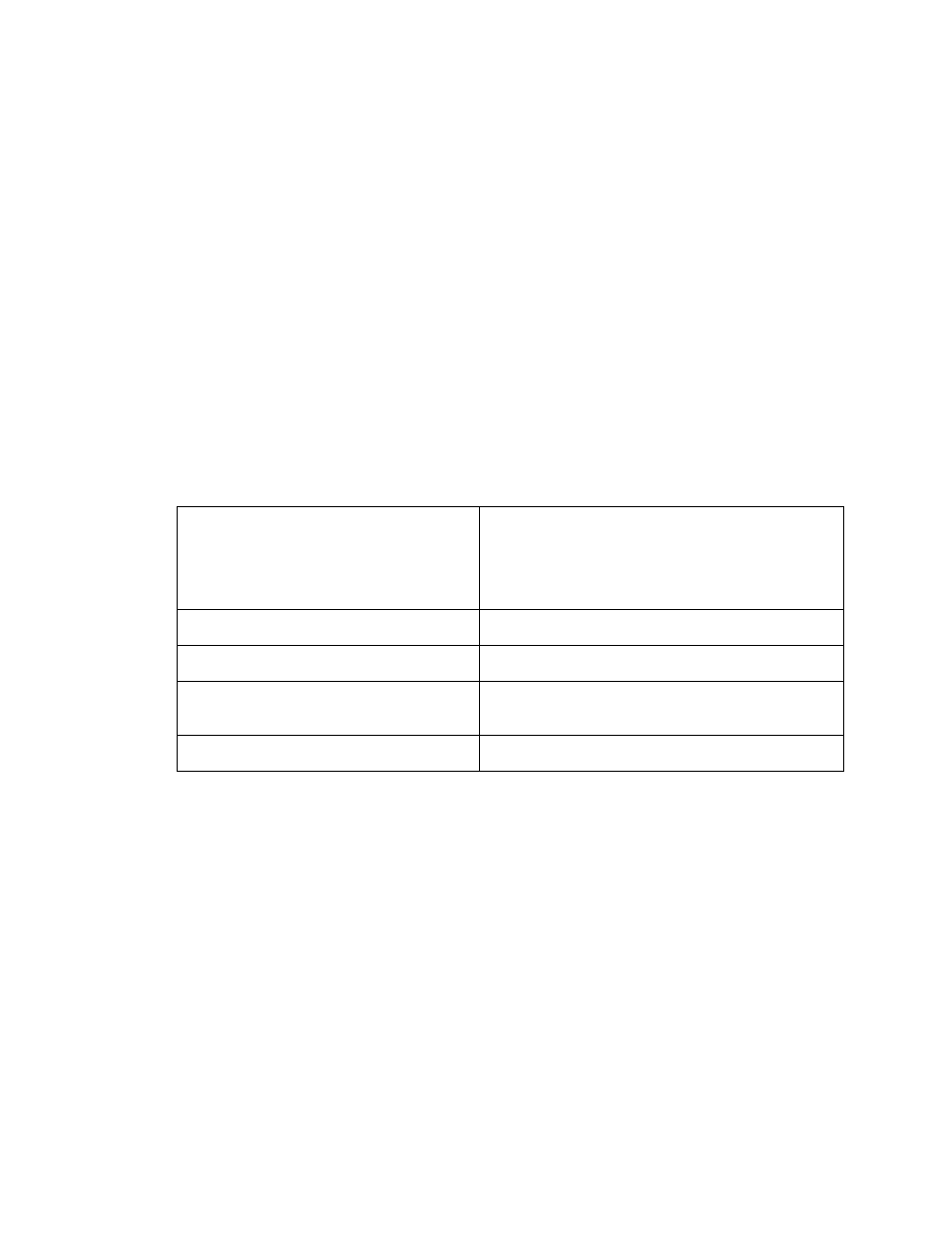
Table 1. ARIA demo command line arguments
--remoteHost
host over the network instead of a
serial port; requires special
hardware or IPTHRU software
mediation.
--robotPort
Connect with robot through specified
serial port name; COM3, for example.
--remoteRobotTcpPort
Remote TCP host-to-robot connection
port number; default is 8080.
--laserPort
Connect with laser rangefinder
through the specified serial port
name; /dev/ttyS3, for example.
--remoteLaserTcpPort
Remote TCP host-to-laser connection
port number; default is 8081.
By default, the ARIA demo program connects with the robot through the serial port COM1
under Windows or /dev/ttyS0 under Linux. And, by default, the demo connects with
the laser rangefinder accessory through serial port COM3 or /dev/ttyS2. To change
those connection options, either modify the ARIA source code (examples/demo.cpp
and related files in src/) and recompile the demo application, or use a startup
argument on the command line. See Table 1.
For example, from the Windows Start:Run dialog, choose Browse… and select the ARIA
demo program: C:\Program Files\ActivMedia Robotics\ARIA\bin\demo.exe.
Then, type a command line argument at the end of the text in the Run dialog as
described in Table 1. To connect through the new Ethernet-to-serial radio device over
the wireless network, for example, try the command:
C:\Program Files\ActivMedia Robotics\ARIA\bin\demo.exe --remoteHost 192.168.1.32
25