Ending a program: endprog – Loctite CARTESIAN 400 User Manual
Page 79
Ending a program: endProg
The following explains how to end a program (running the operation) at the current point. The arm
will not return to the Work Home position.
Command Category
Command Parameter
Job
endProg
-
Ends program run at the current point.
Execute Flow Control
The command “endProg” is invalid at the CP Passing Point or a point whose Base Type is CP
Passing Point.
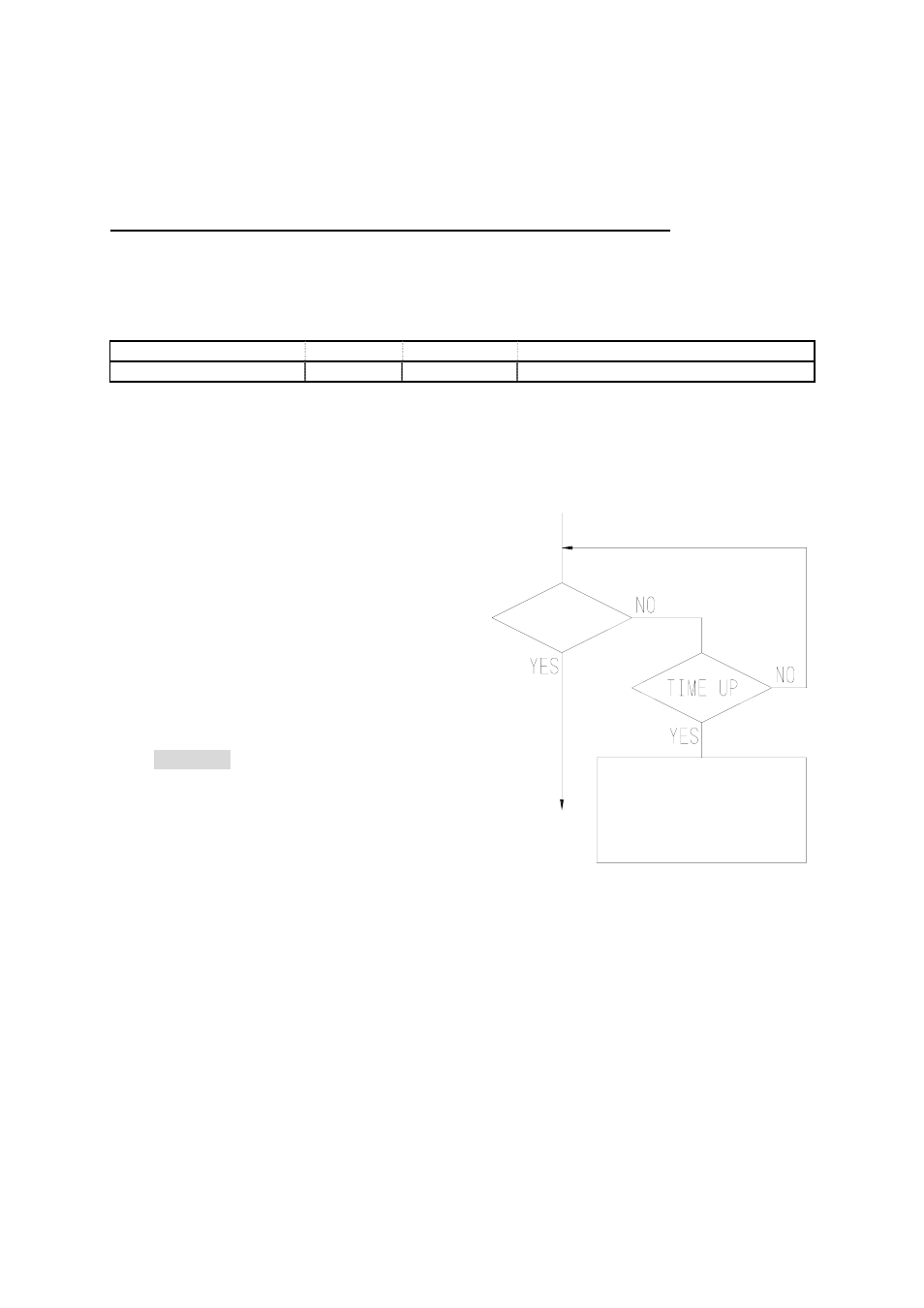
Example: Below is the The Point Job Data for
the operation shown to the right chart
genIn2=ON
Raise the Z axis to the
highest position and end
the program.
waitCondTime 500
ld #genIn2
timeUp
movetoZ 0,10
endProg
endWait
“endProg” is a command to end the program at the current point without returning to the Work Home
position.
It is different from stop in that the robot will not restart operation. You have to start the job from the
beginning.
If you want the robot to return to the Work Home position before ending the program, use the
“goPoint” command with a destination number “0” for the Work Home Position.
Features II CARTESIAN Benchtop Robot
61