Loctite CARTESIAN 400 User Manual
Page 76
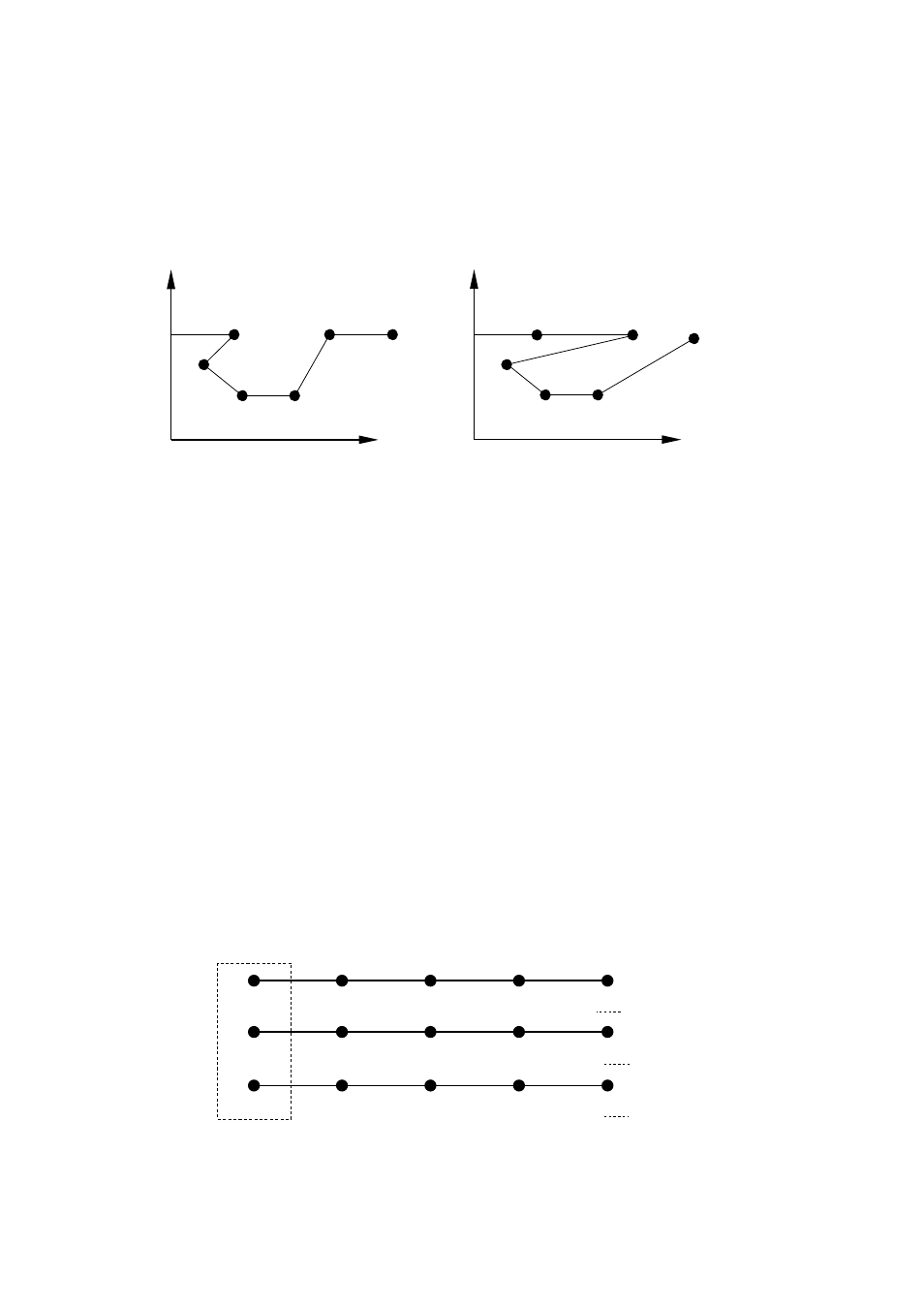
Example: The subprogram is set to [Absolute.]
The tool unit runs on the coordinates of the point data regardless of the position of the called
point. It executes the point job at the start in the work home (in the subprogram) at the current
point (called point) and then shifts to P1 (SP1.)
SP1
SP2
SP3
Calling Point
P7
P6
P8
Calling Point
P6
SP1
SP2
SP3
P7 P8
When the “callProg” command is included in a program that is called by a “callProg” command,
an error is returned if the nest level exceeds 10.
The coordinates (position data) included in the point data can be selected from [Absolute], [Relative]
and [Moving Amount.] The default value is set to [Absolute.]
Absolute Coordinates: position data value is deemed as the fixed coordinates of the robot.
Relative Coordinates: position data value is deemed as the distance from the coordinates where
the program starts. (If the start coordinate is (0,0) it will be the same as
[Absolute.])
Moving Amount: position data value is deemed as the distance to the next point.
Depending on handling of the position data, the moving point positions vary even if the values are
the same. Refer to the following examples.
Point Data Coordinates (0,0) (15,20) (10,20) (5,10)
P1 P2 P3 P4 P5
Absolute
(10,10) (0,0) (15,20) (10,20) (5,10) Absolute coordinates
Relative
(10,10) (10,10) (25,30) (20,30) (15,20) Absolute coordinates
Moving
Amount (10,10) (10,10) (25,30) (35,50) (40,60) Absolute coordinates
Program Start Coordinates
Features II CARTESIAN Benchtop Robot
58