Loctite CARTESIAN 400 User Manual
Page 75
Also, Program Number can be set using expressions.
Example)
declear num eprg
waitCondTime 200
ld #genIn1
timeUp
if
ld #genIn2
then
eprg = 9
else
eprg = 10
endIf
callProg eprg
endWait
Declare the local variable “eprg.”
Wait for 0.2 sec until the following condition is met.
#genIn1=ON (Condition)
If the conditions are not met within 0.2 sec,
If
#genIn2=ON
then
Assign 9 to “eprg.”
If not,
Assign 10 to “eprg.”
Call a subroutine of Program number 9/10.
Point Data Setting
[Position Data] of the program data defines how to handle coordinates (position data) in the point
data. It consists of the following three types.
Absolute Coordinates: position data value is deemed as the fixed coordinates of the robot.
Relative Coordinates: position data value is deemed as the distance from coordinates to where
the program starts.
Moving Amount: position data value is deemed as the distance to the next point.
If you set the subprogram to [Relative] or [Moving Amount], the tool unit always runs at an equal
distance from the called point (to where point job data including “callProg” command is assigned.)
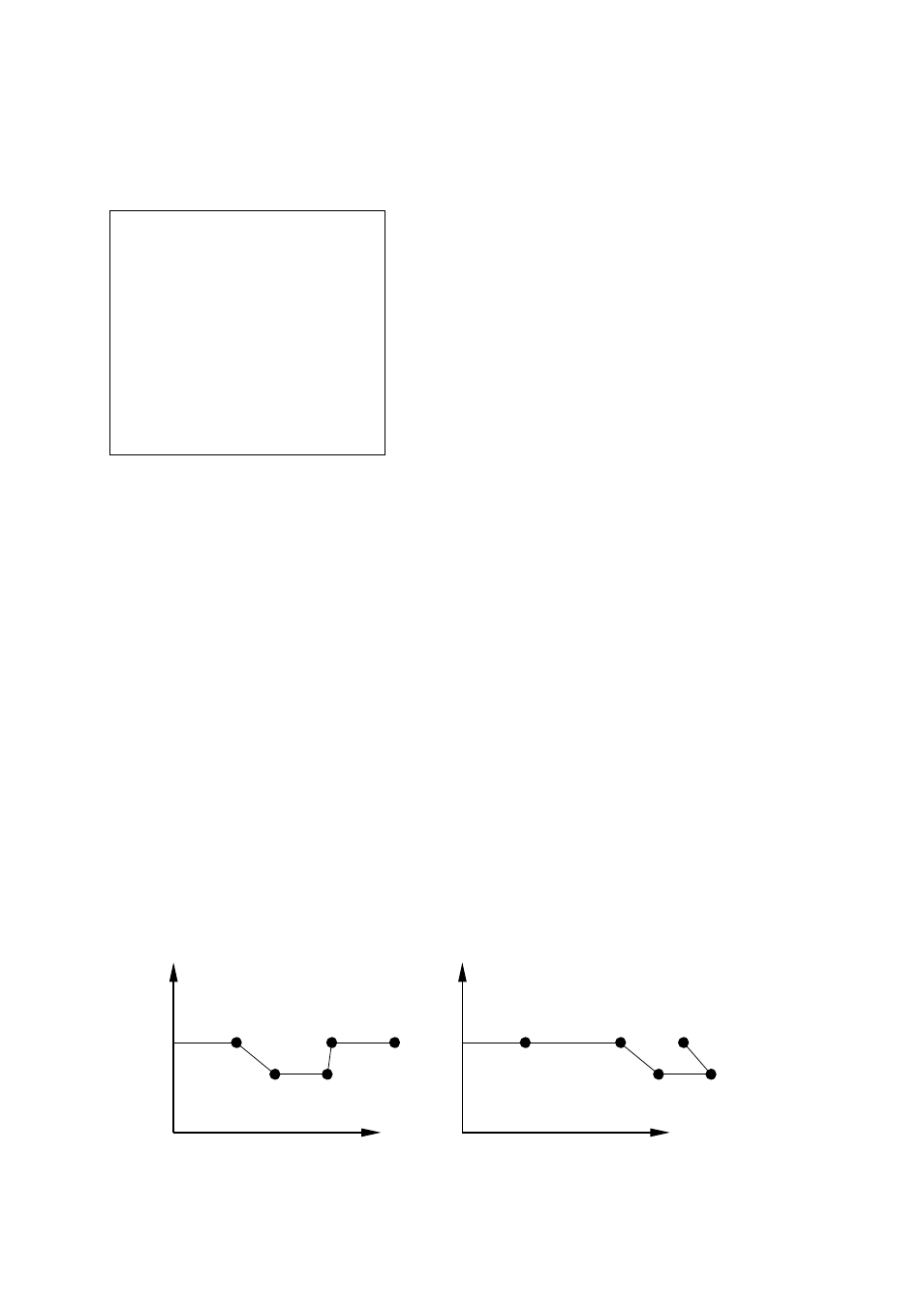
Example: The subprogram is set to [Relative] or [Moving Amount.]
The current point (called point) is P1 (SP1) (excluding P1 coordinate data in the subprogram.)
The work home position is ignored.
Calling Point
P6
SP1
SP2
SP3
P7
P8
Calling Point
P7
SP1
SP2
SP3
P6
P8
Features II CARTESIAN Benchtop Robot
57