SMC Networks ROBO Cylinder RGD4D User Manual
Page 71
61
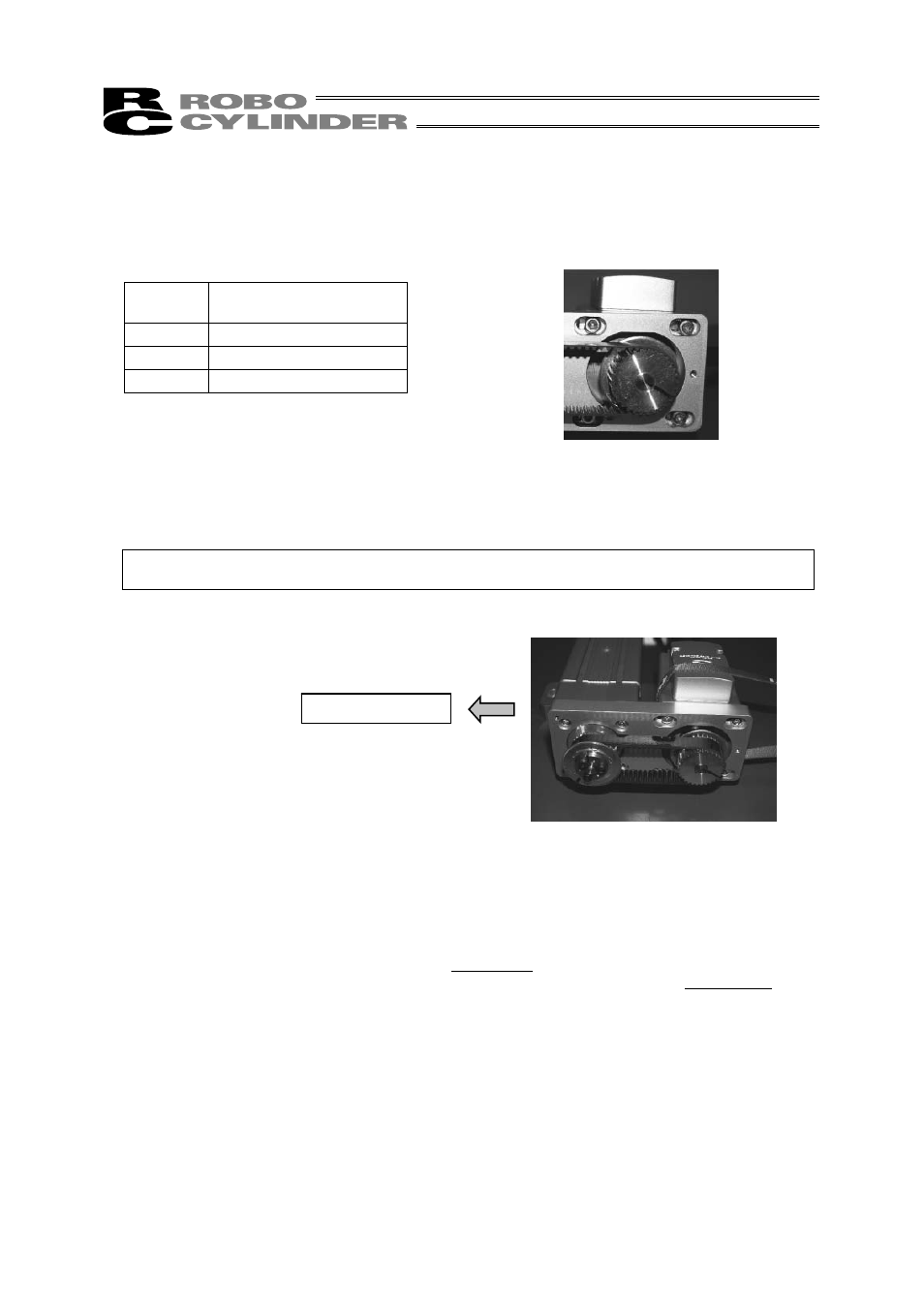
5) Make the following adjustment to restore the home position:
• Move the slider to the mechanical end on the home side and keep it in contact with the mechanical
end.
• Turn the motor shaft by the specified amount from the countermark position toward the return-to-
mechanical-end direction (the direction checked at the beginning).
Type
Amount returned from the
countermark position
RA5R-16
67.5
°
RA5R-8
135
°
RA5R-4
230
°
6) Adjust the belt tension.
Pass a looped strong string (or long tie-band) around the motor cover and pull it with a tension gauge
to the specified tension. In this condition, uniformly tighten the motor-unit affixing bolts.
Recommended tightening torque for adjustment bolts: (M5) 763 N-cm (78 kgf-cm)
Caution: After tightening the bolts to the above torque, tighten them slightly further by making sure
that both pulleys do not move.
7) Install the pulley cover.
Tighten the three hexagon socket head bolts (M3x22) using an Allen wrench of 2.5 mm across flats.
8) Perform homing using a PC or teaching pendant.
(If the actuator is of absolute encoder specification, an absolute reset must be performed). Check for
deviation from the initial home position.
If there is a deviation, adjust parameter No. 22, “Home offset” if you are using an SCON controller. If
you are using an SSEL or X-SEL controller, adjust axis-specific parameter No. 12, “Home preset.” If
your controller is of absolute encoder specification, perform homing after changing the parameter, and
then perform an absolute reset.
Tension: 6
± 0.2 kgf