Pa rameters – Yamaha SRCP User Manual
Page 68
5-
10
5
PA
RAMETERS
5-2 Parameter Description
PRM34: System mode selection
This parameter specifies the system operation mode. When you want to use the SRCP
series in operating specifications that differ from normal mode, change this parameter as
explained below.
This parameter functions are allocated in bit units.
Input range:
0 to 255
Default value: 0
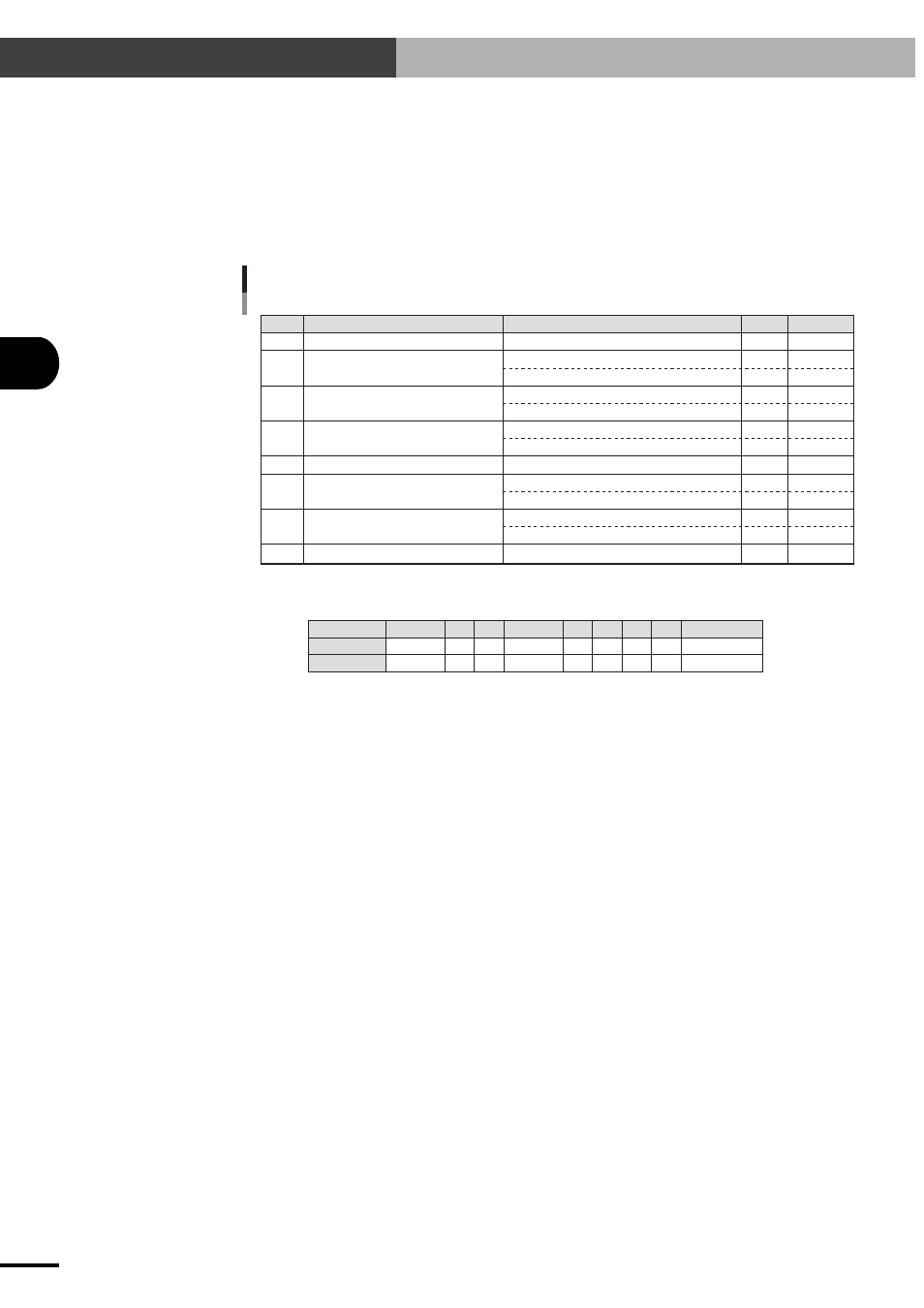
Function allocation in bit units
Example: To turn off the END output sequence after the controller has started normally, and disable the
interlock function:
PRM34 should be set to "68" because of 0000000001000100 (binary)=68 (decimal)
Function
Bit
Bit
Setting
Addition value
15 to 8
0
0
6
1
64
7
0
0
5 to 4
0
0
3
0
0
2
1
4
1
0
0
0
0
0
PRM34
64+4=68
0
1
2
3
4 to 5
6
7
8 to 15
Reserved for system use
READY signal sequence setting
END signal sequence setting when the
controller has started normally
Voltage check setting for system backup
battery
Reserved for system use
Interlock function setting
END output sequence setting at command
execution completion
Reserved for system use
Selected operating mode
ON when emergency stop is canceled. (DRCA compatible)
ON when servo is ON. (SRCA compatible)
ON after controller has started normally.
OFF after controller has started normally.
Check
No check
Enable
Disable
ON at normal command completion
ON at command signal OFF at normal command completion
Setting
Addition value
0
0
1
0
1
0
1
0
0
1
0
1
0
0
0
2
0
4
0
8
0
0
64
0
128
0
Bit 1: READY signal sequence setting
This selects whether to set the READY signal sequence compatible with the DRCA
or SRCA controller.
In DRCA compatible mode, the READY signal turns on at the instant that emer-
gency stop is released. In the SRCA compatible mode the READY signal turns on
when the servo is turned on. (The READY signal will not turn on just by releasing
emergency stop.)
Bit 2: END signal sequence setting when the controller has started nor-
mally
This selects whether to turn on the END signal when the controller has started
normally.
In normal mode, the END signal turns on when the controller has started normally.
In conventional compatible mode, the END signal remains off even when the con-
troller has started normally.
Bit 3: Voltage check setting for system backup battery
This selects whether to check the system backup battery voltage when the control-
ler servo is turned on.
In such cases where you want to operate the robot immediately even when the
battery needs to be replaced, you can temporarily disable this voltage check.
(System backup batteries are located inside the controller and used to back up the
parameters and point data.)
Bit 6: Interlock function setting
This selects whether to enable or disable the interlock function. The interlock func-
tion is enabled by default. If the interlock function is disabled, use caution and be
aware of the robot movement.