Robot language – Yamaha SRCP User Manual
Page 124
8-
26
8
ROBOT LANGUAGE
8-5 Sample Programs
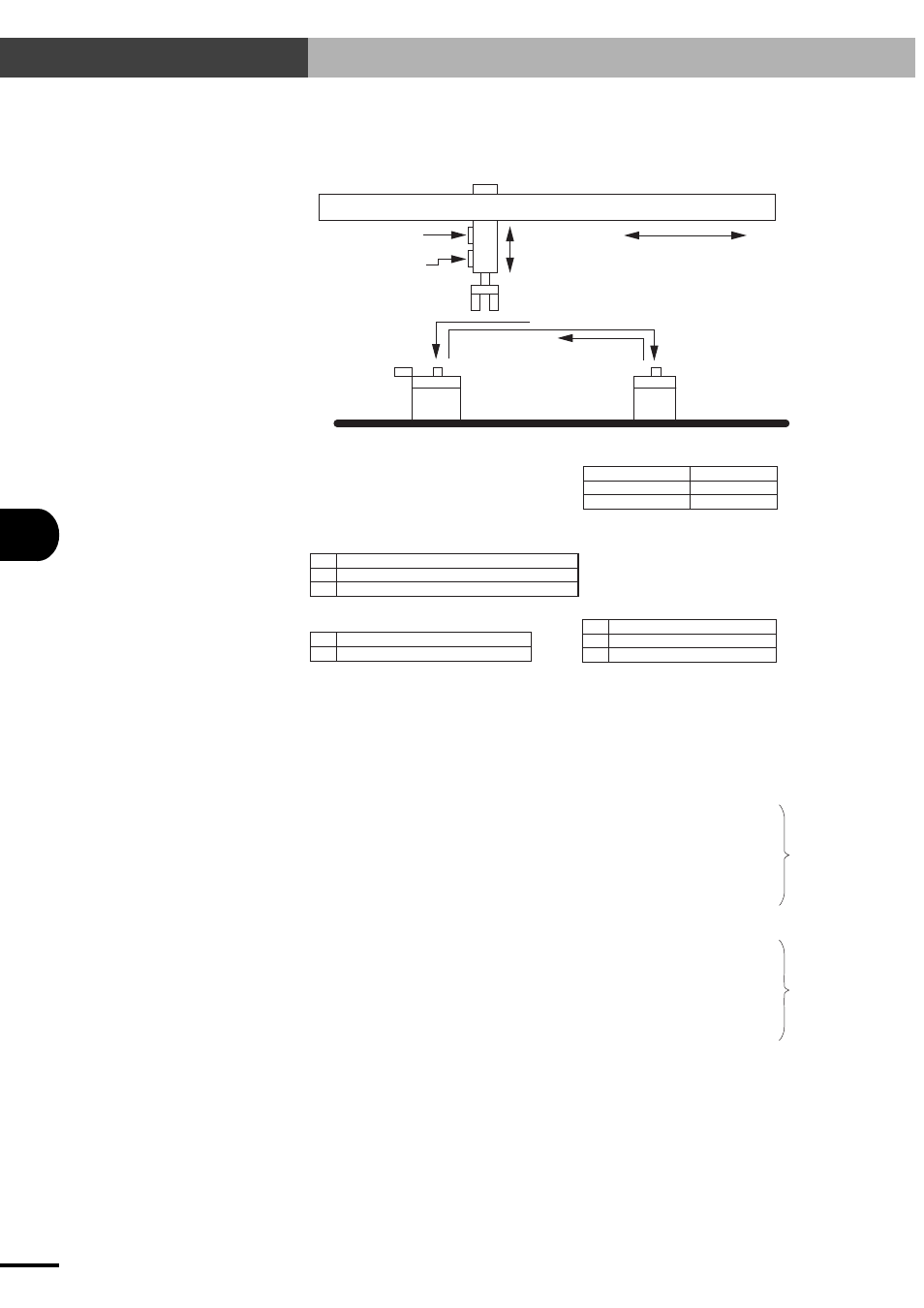
8-5-4 Robot stands by at P0, and moves to P1 and then to P2 to
pick and place a workpiece
Horizontal direction
Vertical direction
Hold
AC servo motor
Air cylinder
Air chuck
Actuator
DI0
DI1
DI2
Upper end limit switch
1: ON
0: OFF
Lower end limit switch
1: ON
0: OFF
Workpiece detection sensor 1: Detected 0: No
General-purpose input
DO0
DO1
Air cylinder
1: Down 0: Up
Air chuck
1: Close 0: Open
General-purpose output
P0
P1
P2
Robot standby position
Workpiece feed position
Workpiece mount position
Point
Operation
q
w
e
Moves to the workpiece feed position from the
standby position, and picks up a workpiece.
Moves to the workpiece mount position and places
the workpiece.
Returns to the standby position.
P1
P2
P0
e
q
w
X-axis
AC servo
Air cylinder
(DO0)
Air chuck
(DO1)
Upper end limit
switch (DI0)
Lower end limit
switch (DI1)
Workpiece detection
sensor (DI2)
Program
Comment
[NO1]
001: L
1
; Label definition
002: MOVA
0,
100
; Moves to the standby position
003: WAIT
2,
1
; Waits for workpiece feed
004: MOVA
1,
100
; Moves to the workpiece feed position
005: DO
0,
1
; Air cylinder moves down
006: WAIT
1,
1
; Waits until the air cylinder moves down
007: DO
1,
1
; Chuck closes
Picks up
workpiece
008: TIMR
100
; Delays for one second
009: DO
0,
0
; Air cylinder moves up
010: WAIT
0,
1
; Waits until the air cylinder moves up
011: MOVA
2,
100
; Moves to the workpiece mount position
012: DO
0,
1
; Air cylinder moves down
013: WAIT
1,
1
; Waits until the air cylinder moves down
Placing
workpiece
014: DO
1,
0
; Chuck opens
015: TIMR
100
; Delays for one second
016: DO
0,
0
; Air cylinder moves up
017: WAIT
0,
1
; Waits until the air cylinder moves up
018: JMP
1,
1
; Returns to L1