Bypass/engineered drive parameter settings, E7 bypass applications 7-3 – Yaskawa E7 Apogee FLN User Manual
Page 43
E7 Bypass Applications 7-3
Bypass/Engineered Drive Parameter Settings
For many applications, the drive is integrated into a bypass or engineered package. This type of package typically features an enclosure
with contactors that allow the user to run the motor from line power (bypass mode) or from the drive (drive mode). This package also
provides the flexibility for interfacing normally closed safety interlocks (fire status, freeze status, vibration sensors, etc.) which stop the
drive if the contacts open.
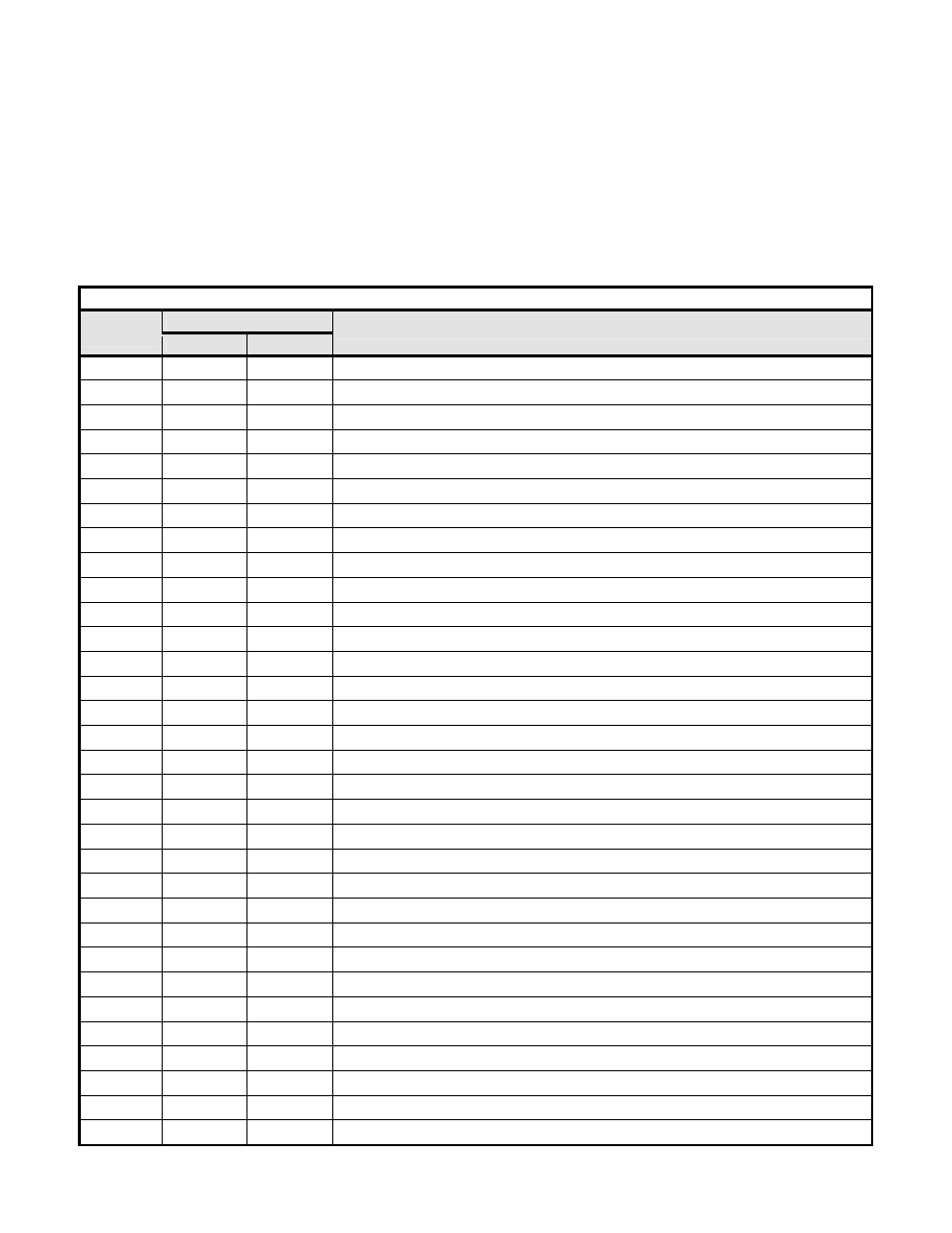
Typical Parameter Settings
A bypass/engineered drive is supplied with a list of parameters and their default values. Use the table below to record any parameter
modifications for this particular application.
Table 7.1 - Typical Bypass/Engineered Drive Parameters
Bypass Settings
Parameter
Number
Default
User
Description
E1-01
Input Voltage (VAC) – Parameter defaults dependent on drive model
E1-05
Maximum Output voltage (VAC) – Parameter defaults dependent on drive model
E2-01
Motor Rated Current (FLA) (A) – Parameter defaults dependent on drive model
T1-02
Motor Rated Power (kW) – Parameter defaults dependent on motor
T1-04
Motor Rated Current (FLA) (A) – Parameter defaults dependent on motor
A1-01
2
Parameter Access Level (2 – Advanced)
b1-01
Frequency Reference Source (dependent on options specified)
b1-02
Command Source (dependent on options specified)
b1-03
0
Stopping Method (0 – Ramp to Stop) (ramp slope set by C1-02)
b1-04
1
Reverse Operation (1 – Disabled)
b1-07
1
Local/Remote RUN Selection (1 – Accept External RUN)
b1-08
1
RUN Command During Programming (1 – Enabled)
b1-12
HAND Mode Frequency Reference Selection (Operator Keypad)
b2-02
50%
DC Injection Braking Current (50%)
b2-03
5.0 sec
DC Injection Braking Current @ Start (5.0sec)
b2-09
0.0A
Motor Preheat Current
b3-01
1
Speed Search Select (1 – Enabled (Speed Estimated))
b8-01
1
Energy Conservation Control Select (1 – Enabled)
C1-01 60.0
sec
Acceleration
Time
C1-02 60.0
sec
Deceleration
Time
d1-01
10.0 Hz
Frequency Reference 1 (HAND Mode) (see H1-03)
d1-02
20.0 Hz
Frequency Reference 2 (HAND Mode) (see H1-03)
E1-01
Input
Voltage–
Parameter
defaults dependent on drive model
E1-03
7
V/F Pattern Select
E1-05
Output
Voltage–
Parameter
defaults dependent on drive model
F6-01
3
Operation After Communication Loss (3 – Alarm Only)
H1-01
6A
Terminal S3 Function (Drive Enable)
H1-02
6
Terminal S4 Function (Local /Remote Select)
H1-03
6C
Terminal S5 Function (Frequency Reference 2 (N.O.))
H1-04
20
Terminal S6 Function (External Fault (N.O.))
H1-05
8
Terminal S7 Function (External Base Block (N.O.))
H2-02
3B
Terminal M3-M4 (Command Source – Serial)