Reference units, Reference units (user units) – Yaskawa MP2300 User Manual
Page 13
MP2300 Quick Reference Guide Rev1.5
Reference Units (User Units)
FP34: Rated Speed [RPM] (Default 3000)
OL8010: Speed Reference [select unit OW8003.0-3] (Default 3000)
0: [
RU
/sec]
1: [10^
n
RU
/min]
2: [% of Rated Speed (FP34)]
OL801C: Position Reference [
RU
]
or
OL8044: Step Distance [
RU
]
OB80092 = Step Direction
OL8036: Acceleration [select unit OW8003.4-7] (Default 0)
0: [
RU
/sec^2]
1: [ms to Rated Speed (FP34)]
Servopack Pn80B: Acceleration Rate
[10,000
RU
/sec^2] (Default 65535)
FP1.A=1
Update at power up or
when changed
OL8038: Deceleration [select unit OW8003.4-7] (Default 0)
0: [
RU
/sec^2]
1: [ms to Rated Speed (FP34)]
Servopack Pn80E: Deceleration Rate
[10,000
RU
/sec^2] (Default 65535)
FP1.A=1
Update at power up or
when changed
OL8036/OL8038 =0 sets servopack acceleration/deceleration rate to
65535[10,000 RU/sec^2], independent of unit selected in OW8003.4-7
n = 3 when
FP4=0 (pulse)
n = FP5 when
FP4<>0
KEY
* RU = "reference unit" = "command unit" - fraction of the User Unit
* User Unit = base unit such as mm or inch
* FP = Fixed Parameter
* MCC = Motion Command Code (OWxx08)
* Register Values given for Circuit#1, Axis#1
* Bold type represents default setting
RU = FP4 *10^-
n
User Unit = FP4
0: Pulse (post quad)
1: mm
2: deg
3: inch
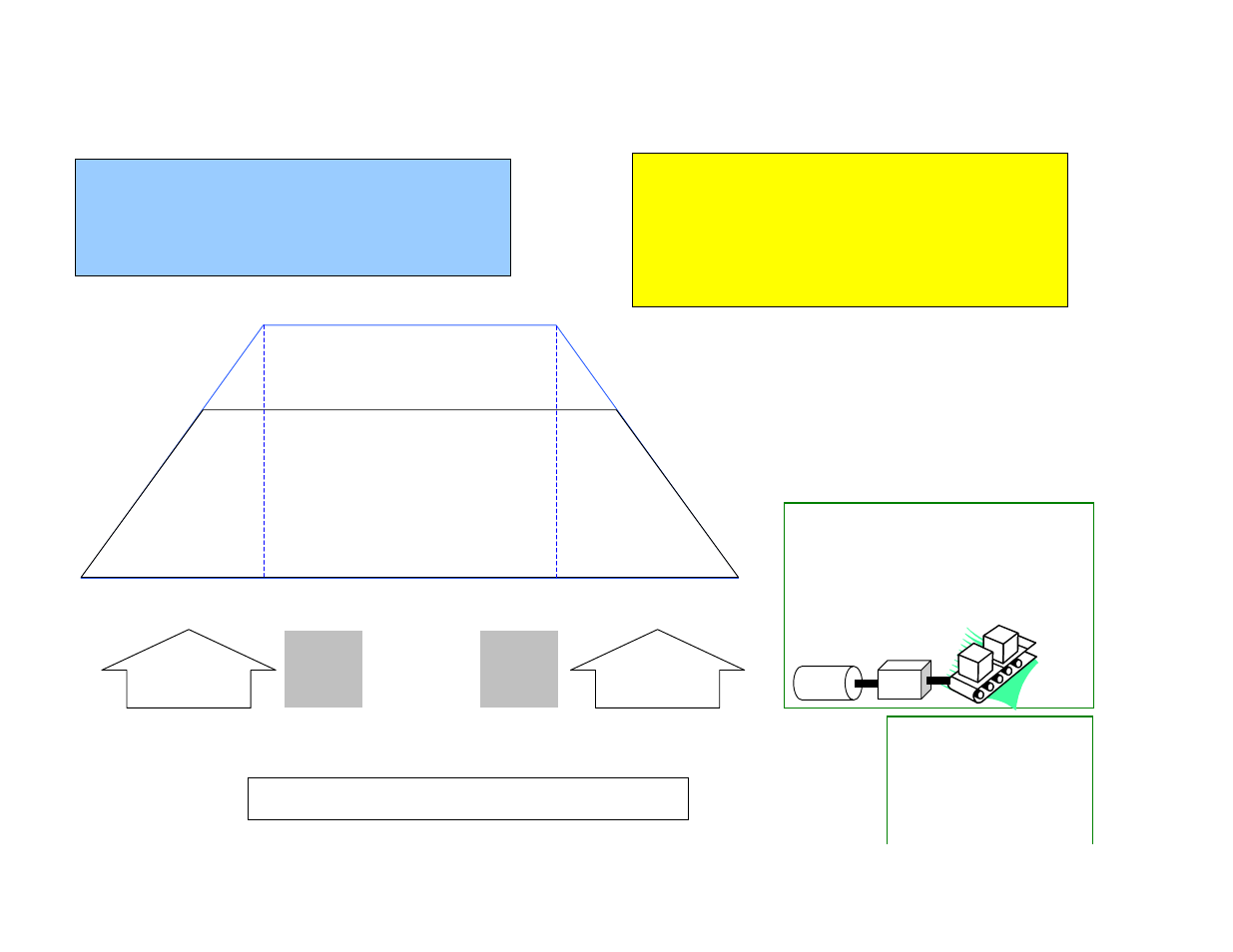
If PULSE is not chosen as the User Unit, use the
following parameters to define the relationship
between PULSE and RU.
FP36: Encoder Pulses (post quad) per motor rev
FP8: Motor Revs into gearbox
FP9: Machine Shaft Revs out of gearbox
FP6: RU per Machine Shaft Revolution
Motor
G.B.
36
8
9
6
NOTES:
* Register Addresses assume Circuit#1, Axis#1
* Reference Units not compatible with Function Block programming.
* Default Positioning units are [encoder pulses (post quad)]
* Default Speed Reference units are [1000 pulses/min]
* Default Accel/Decel units are [ms to rated motor rpm]
* Default FP1.A=1 autmatically transfers accel/decel to servopack
* MPE720 5.31B "Units" in module configuration do not update
* Basic Module User Manual
(SIEPC88070003B)
lists incorrect unit defaults
Use MCC=10
to change
Acceleration
when FP1.A=0
Use MCC=11
to change
Deceleration
when FP1.A=0
For an "Infinite Length" Axis
* Rotary Table
* Conveyor
FP1 bit0: Set axis type to "Infinite
Length"
FP10: Set R.U. per rotation.
This will be 360 degrees
(converted to R.U.) for a rotary
Page 13 of 14