Motion program startup procedure – Yaskawa MP2300 User Manual
Page 10
MP2300 Quick Reference Guide Rev1.5
First complete the MP2300 Commissioning Procedure
There should be a new controller folder
Step
Instruction
Detail
1
Log on Online
R-Click Controller folder and select Log Off. R-click again
and check "online". Double-click controller folder to log on
2
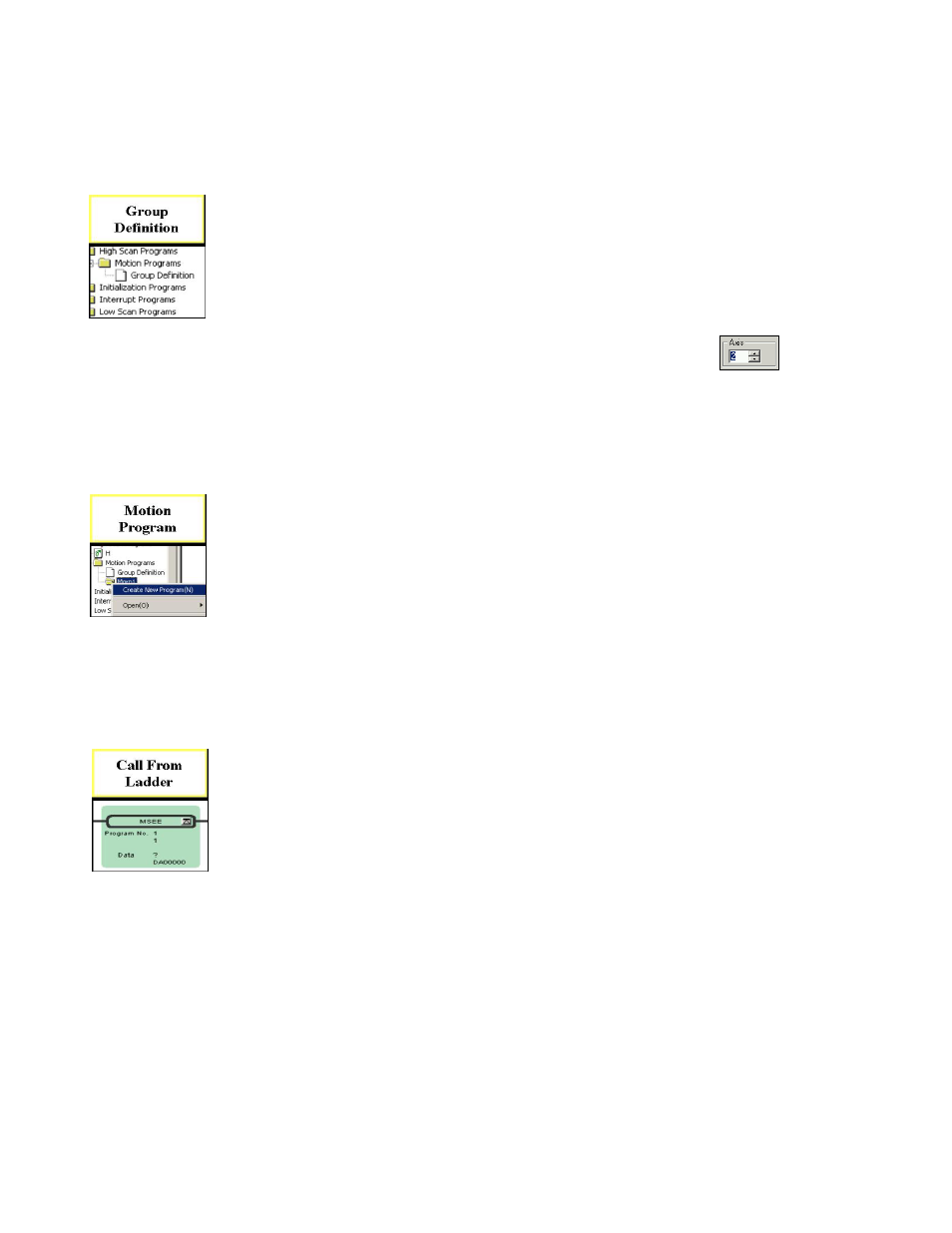
Open Group Definition
In File Manager-> Programs -> High Scan Programs ->
Motion Programs -> DoubleClick "Group Defnition"
3
Enter & Save a Group Name
Under the "Group List" Tab. When saved a new "Group01"
tab will appear.
4
Enter the number of axes that
will be used in the Motion
Program
Under the "Group01" Tab, in the "Axis" area.
5
Define Module Number, Axis
Number, and Axis Name
Under "Group01" Tab, in the "Axis Definition" area. In the
"Physical" row, 01.01 means motion module 1, axis 1.
Usually the default is fine. In the "Logical" row, enter a text
name for the axis, such as X or Y.
6
Save Group Definition
Save Icon
7
Refresh view
In File Manager, Under View menu, choose Refresh
Step
Instruction
Detail
1
Start a new Motion Program
In File Manager-> Programs -> High Scan Programs ->
Motion Programs, R-click "Motion Group01" and select
"New Program".
2
Things to know before a Motion
Program is started
There are no commands for SERVO ON or JOG in the
Motion Programming Language. These steps are to be
accomplished in Ladder.
3
Write Motion Program
First line must be 'MPM001' and last line must be 'END;'.
Instructions terminate with semicolon. Comments enclosed
in quotes ("comment"). Refer to Motion Programming User
Manual (SIEZ-C887-1.3) for extensive details on each
command.
4
Save Motion Program
Use save icon. Also save to flash.
Step
Instruction
Detail
1
Use the MSEE instruction
MSEE is located under the "Motion" tab in Ladder Editor. It
can only be used in an H-drawing. Define a starting
address for the four 16-bit work registers in the Data field.
Often DA00000 is used defining DW00000 through
DW00003, but be sure to use M or D registers that are not
used elsewhere.
2
Rules before starting
All axes in the group must have: 1) Servo On, 2) Motion
Command Code =0 and not continually updated to 0, 3) No
other motion program in same group runnin, in alarm, or
paused, 4) SERVOPACK self-writing function disabled -
FixedParameter 1 bit A=1.
3
Start the motion program
Bit 0 of the second word defined in the Data field
(DB000010 in the above example) must go high for the
motion program to start. See Motion Program Work
Registers in this QRG for more information.
4
Rules while running
Ladder code must not manipulate Motion Command Code,
unless motion language is not using the Motion Command
Code register the time, and proper interlocks are used to
flag the ladder code
Group Definition (axes used in motion program)
Motion Program
Call From Ladder
Motion Program Startup Procedure
Page 10 of 14