15 inverter-specific functions, Flying start, Automatic restart – Watson-Marlow MM420 User Manual
Page 83: Holding brake
Issue 10/06
3 Functions
MICROMASTER 420 Operating Instructions
6SE6400-5AA00-0BP0
83
3.5.5.15 Inverter-specific
Functions
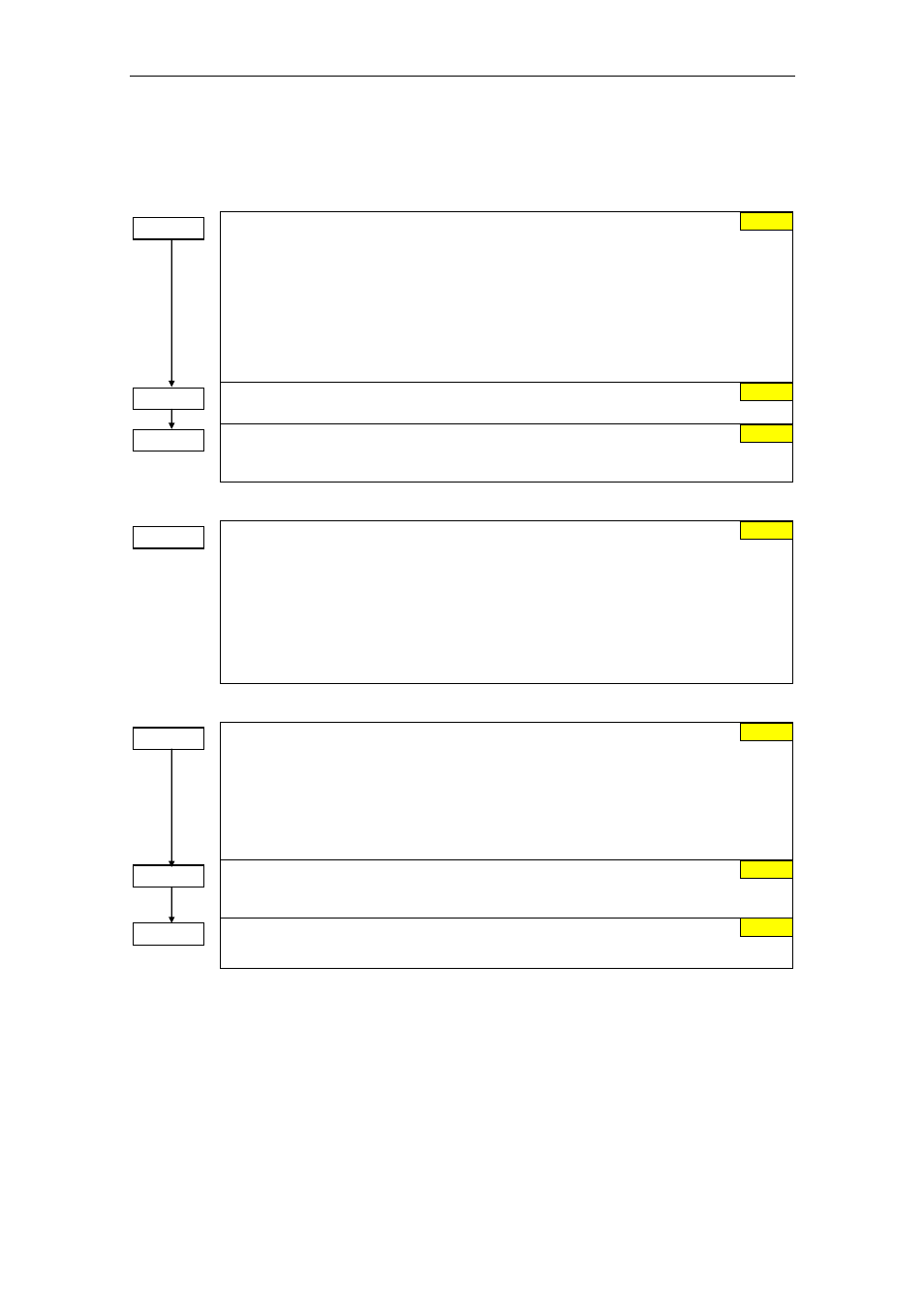
Flying start
P1200 =...
Flying start
Starts inverter onto a spinning motor by rapidly changing the output frequency of the
inverter until the actual motor speed has been found.
0 Flying start disabled
1 Flying start is always active, start in direction of setpoint
2 Flying start is active if power on, fault, OFF2, start in direction of setpoint
3 Flying start is active if fault, OFF2, start in direction of setpoint
4 Flying start is always active, only in direction of setpoint
5 Flying start is active if power on, fault, OFF2, only in direction of setpoint
6 Flying start is active if fault, OFF2, only in direction of setpoint
P1202 =...
Motor-current: Flying start
(entered in %)
Defines search current used for flying start.
P1203 =...
Search rate: Flying start
(entered in %)
Sets factor by which the output frequency changes during flying start to synchronize with
turning motor.
Automatic restart
P1210 =...
Automatic restart
Configures automatic restart function.
0 Disabled
1 Trip reset after power on
2 Restart after mains blackout
3 Restart after mains brownout or fault
4 Restart after mains brownout
5 Restart after mains blackout and fault
6 Restart after mains brown/blackout or fault
Holding brake
P1215 =...
Holding brake enable
Enables/disables holding brake function (MHB).
0 Motor holding brake disabled
1 Motor holding brake enabled
NOTE
The following must apply when controlling the brake relay via a digital output: P0731 = 14
(refer to Section 3.5.5.4 "Digital ").
P1216 =...
Holding brake release delay
(entered in s)
Defines the time interval during which the frequency inverter runs with the min. frequency
P1080 after magnetizing, before the ramp-up starts.
P1217 =...
Holding time after ramp-down
(entered in s)
Defines time for which inverter runs at minimum frequency (P1080) after ramping down.
0
100 %
100 %
0
1.0 s
1.0 s
0