Chapter 9: smart a/d™ timing, 1 overview, 2 slot time – Sensoray 2518 User Manual
Page 27: 3 update rate
Sensoray Model 2518/2519 Ethernet Smart A/D™
24
Theory of Operation
Chapter 9: Smart A/D™ Timing
9.1 Overview
Three Smart A/D™ timing parameters are important
from the application developer’s viewpoint: Channel
Update Rate, Data Age and Communication Latency.
This section discusses these parameters along with some
important related issues.
9.2 Slot Time
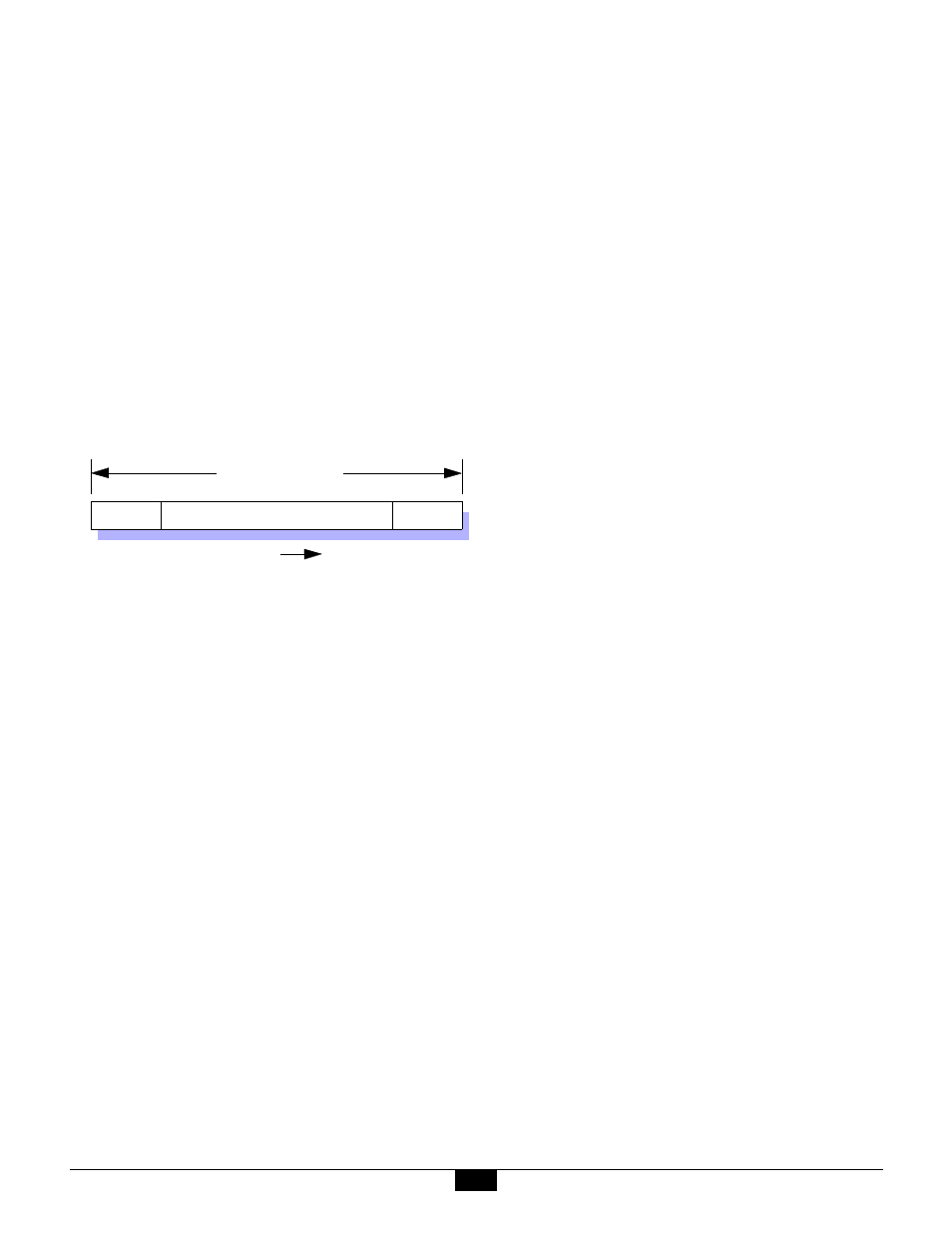
Channel Slot Time is the length of time required for the
Smart A/D™ to completely process one sensor channel.
Each channel slot time encompasses three functional
phases as shown in the following diagram:
In the first phase, a sensor channel is excited and its sense
signals are routed through to the Smart A/D™
measurement section. The embedded microcomputer
configures the signal path as appropriate for the sensor
type, then the analog front end is given time to stabilize.
The digitizer acquires the sensor data value in the second
phase. The Update Rate, which is described in the next
section, can be increased by reducing the duration of the
time slot’s Digitize phase. See Section 6.3.4 for details.
A Recover phase occurs at the end of the time slot. The
function of this phase is to reset the analog front end in
preparation for the next conversion.
Computationally intensive processes, such as
linearization, alarm processing and software filtering,
don’t affect the slot time because they execute
concurrently during the subsequent channel slot time.
9.3 Update Rate
Update Rate is defined as the number of times each
second that a sensor channel acquires new sensor data.
9.3.1 Primary Influences
The two primary influences on update rate are the
number of active channels and the channel slot time.
Due to timing uncertainties, the update rate is expressed
as a range of values bounded by minimum and maximum
times. The minimum and maximum update rate for any
active channel is given by these functions:
The time difference between the minimum and maximum
update rate is due to the automatic, interleaved
measurement of internal Smart A/D™ reference
standards. Other than their timing impact, these
measurements—which are scheduled and executed
autonomously by the embedded processor—are
transparent to the application program. At most, one
internal standard will be measured per every sixteen
sensor channel measurements.
Clearly, the update rate increases as the number of active
channels decrease. Channels can be removed from the
scan loop by disabling them with the SetSensorType
command with the Disabled sensor definition code.
For example, a Smart A/D™ that has eight active
channels and is running at the default channel slot time
(22 milliseconds) would have a worst-case channel
update rate ranging from 5.1 to 5.7 samples per second:
Note that these timing calculations apply to each Smart
A/D™ board. In the case of model 2519, which employs
two model 518 Smart A/D™ boards, the update rates
must be independently computed for each Smart A/D™
board.
For example, with all sixteen channels enabled on a
model 2519, each model 518 Smart A/D™ will have
eight channels enabled, and will therefore have a
worst-case channel update rate ranging from 5.1 to 5.7
samples per second as in the above example.
Settle
Digitize
Recover
time
One Slot Time
UpdateRate
min
1
NumActiveChans
1
+
(
)
SlotTime
×
------------------------------------------------------------------------------------------
=
UpdateRate
max
1
NumActiveChans
SlotTime
×
----------------------------------------------------------------------------
=
UpdateRate
min
1
8
1
+
(
)
0.022
×
-------------------------------------
5.1Hz
≈
=
UpdateRate
max
1
8
0.022
×
----------------------
5.7Hz
≈
=