R p fp c l r, 控制暫存器 cr, 異常訊號及故障排除 – Delta Electronics Network Device DVP01PU-S User Manual
Page 2: 注意事項, 產品簡介, 控制寄存器 cr, 異常信號及故障排除
項 目
說 明
外部輸入點
全部採用光耦合作隔離,輸出/入信號皆附 LED 作為信號及致能的指示
輸入點:START, STOP, LSP, LSN, DOG 為接點或電晶體開集極 24V DC±10%, 5±1mA
輸入點:ΦA, ΦB 為差動或電晶體開集極 5 ~ 24V DC, 6 ~ 15mA
輸入點:PG0 為差動或電晶體開集極 5 ~ 24V DC, 6 ~ 15mA
脈波輸出方式
三種模式:Pulse/Dir, FP (CW)/RP (CCW), A/B;均採用差動輸出
定位控制程式與
主機資料交換
主機使用 PLC 程式搭配 FROM/TO 指令來讀取/寫入 CR 的資料內容,如果資料內容為 32 位元時,以 2
個 CR 處理,內建 16 位控制暫存器區 CR#0 ~ CR#48
與 DVP-PLC 主機
串接說明
模組編號以靠近主機順序自動編號由 0 到 7,最大可連接 8 台,不佔用數字 I/O 點數
其他規格
環 境 規 格
操作/儲存環境
1.
操作:0
°C
~ 55
°C
(溫度),50 ~ 95%(濕度),污染等級 2
2.
儲存:-25
°C
~ 70
°C
(溫度),5 ~ 95%(濕度)
耐振動/衝擊
國際標準規範 IEC 61131-2, IEC 68-2-6 (TEST Fc)/IEC 61131-2 & IEC 68-2-27 (TEST Ea)
控制暫存器 CR
CR
編號
HW LW
通訊
位址
保
持
型
屬性
內容
設定範圍
#0 H’4190
○
R
機種型號
系統內定,唯讀;機種編碼請參照機種型號列表 H’0110
#2 #1 H’4191
○
R/W 馬達轉一圈所需脈
波數 A
設定範圍 1 ~ +2,147,483,647 PPS/REV;初始值:2,000 脈波數/轉一圈
(PLS/REV)
#4 #3 H’4193
○
R/W
馬達轉一圈移動距
離 B
設定範圍 1 ~ +2,147,483,647 unit/REV;初始值:1,000 (unit*1/REV)
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1
b0
#5 H’4195
○
R/W
參數設定
初始值:H’0000
S
T
O
P
輸
入
極
性
S
T
A
R
T
輸
入
極
性
S
T
A
R
T
回
應
時
間
加
速
曲
線
選
擇
D
O
G
極
性
D
O
G
觸
發
啟
動
模
式
旋
轉
方
向
原
點
復
歸
方
向
L
S
N
輸
入
極
性
L
S
P
輸
入
極
性
脈
波
輸
出
方
式
位
置
資
料
倍
率
設
定
單
位
系
設
定
#7 #6 H’4196
○
R/W
最高速度 Vmax
設定範圍 0 ~ +2,147,483,647 unit*1 (10 ~ 200 kPPS 的脈波轉換值) *2;
初始值:200,000 unit*1
#9 #8 H’4198
○
R/W
啟動速度 Vbias
設定範圍 0 ~ +2,147,483,647 unit*1 (0 ~ 200 kPPS 的脈波轉換值) *2;
初始值:0 unit*1
#11 #10 H’419A
○
R/W
寸動 JOG 速度 V
JOG
設定範圍 0 ~ +2,147,483,647 unit*1 (10 ~ 200 kPPS 的脈波轉換值) *2;
初始值:5,000 unit*1
#13 #12 H’419C
○
R/W
原點復歸速度 V
RT
設定範圍 0 ~ +2,147,483,647 unit*1 (10 ~ 200 kPPS 的脈波轉換值) *2;
初始值:50,000 unit*1
#15 #14 H’419E
○
R/W
原點復歸減速速度
V
CR
設定範圍 0 ~ +2,147,483,647 unit*1 (10 ~ 200 kPPS 的脈波轉換值) *2;
初始值:1,000 unit*1
#16 H’41A0
○
R/W
原點復歸之零點
(PG0)
信號數 N
設定範圍 0 ~ +32,767 PLS;初始值:0 PLS
#17 H’41A1
○
R/W
原點復歸之脈波信
號數 P
設定範圍 -32,768 ~ +32,767 PLS;初始值:0 PLS
#18 H’41A2
○
R/W
原點復歸模 H
MODE
b0
:原點復歸模式,b1:原點復歸 DOG 下降緣偵測
#20 #19 H’41A3
○
R/W
原點位置定義 HP
設定範圍 0 ~ ±999,999 unit*1;初始值:0 unit*1
#21 H’41A5
○
R/W
加速時間 Tacc
設定範圍 10 ~ +32,767 ms;初始值:100 ms
#22 H’41A6
○
R/W
減速時間 Tdec
設定範圍 10 ~ +32,767 ms;初始值:100 ms
#24 #23 H’41A7
╳ R/W 目標位置(I) P(I)
設定範圍 -2,147,483,648 ~ +2,147,483,647 unit*1 (-2,147,483,648 ~
+2,147,483,647
脈波轉換值) *2;初始值:0 unit*1
#26 #25 H’41A9
╳ R/W 運轉速度(I) V(I)
設定範圍 -2,147,483,648 ~ +2,147,483,647 unit*1 (10 ~ 200 kPPS 的脈波轉
換值) *2;初始值:1,000 unit*1
#28 #27 H’41AB
╳ R/W 目標位置(II) P(II)
設定範圍 -2,147,483,648 ~ +2,147,483,647 unit*1 (-2,147,483,648 ~
+2,147,483,647
脈波轉換值) *2;初始值:0 unit*1
#30 #29 H’41AD
╳ R/W 運轉速度(II) V(II)
設定範圍 0 ~ +2,147,483,647 unit*1 (10 ~ 200 kPPS 的脈波轉換值) *2;
初始值:2,000 unit*1
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
#31 H’41AF
╳ R/W
運轉命令
初始值:H’0000
-
-
C
L
R
輸
出
O
n
/O
ff
控
制
C
L
R
信
號
輸
出
模
式
-
現
在
位
置
歸
零
-
軟
體
S
T
A
R
T
絕
對
/相
對
座
標
設
定
原
點
復
歸
啟
動
JO
G
-
運
轉
JO
G
+
運
轉
反
方
向
脈
波
停
正
方
向
脈
波
停
軟
體
S
T
O
P
錯
誤
重
置
b15 b14
b13
b12 b11 ~ b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
#32 H’41B0
╳ R/W
工作模式
初始值:H’0001
-
-
現
在
位
置
C
R
3
4
, 3
3
,
現
在
速
度
C
R
3
6
, 3
5
顯
示
單
位
(0
p
u
ls
e,
1
u
n
it)
復
歸
出
廠
設
定
M
A
S
K
選
擇
設
定
L
S
P
/L
S
N
停
止
模
式
手
搖
輪
M
P
G
範
圍
限
制
S
T
O
P
模
式
手
搖
輪
M
P
G
輸
入
操
作
變
速
度
運
轉
模
式
啟
動
插
入
二
段
速
定
位
運
動
模
式
啟
動
連
續
兩
段
速
定
位
運
動
模
式
啟
動
插
入
單
段
速
定
位
運
動
模
式
啟
動
單
段
速
定
位
運
動
模
式
啟
動
#34 #33 H’41B1
╳ R/W 現在位置 CP(PLS) 顯示範圍:-2,147,483,648~+2,147,483,647 PLS;初始值:0 PLS
#36 #35 H’41B3
╳ R/W 現在速度 CS(PPS) 顯示範圍:0 ~ +2,147,483,647 PPS;初始值:0 PPS
#37 H’41B5
○
R/W
通訊位址及速率
(Baud Rate)
設定
設定 RS-485 通訊位址,設定範圍 01 ~ 254。出廠設定值為 K1。
設定通訊速率,共有 4,800, 9,600, 19,200bps, 38,400 bps, 57,600 bps, 115,200
bps
六種。
ASCII
模式資料格式固定為 7Bit、偶位元、1 stop bit ( 7 E 1),RTU 模式資
料格式固定為 8Bit、偶位元、1 stop bit ( 8 E 1)。
b0: 4,800 bps
(位元/秒)。 b1: 9,600 bps(位元/秒)。(出廠設定值)
b2: 19,200 bps
(位元/秒)。 b3: 38,400 bps(位元/秒)。
b4: 57,600 bps
(位元/秒)。 b5: 115,200 bps(位元/秒)。
b6:
保留。
b7: 0
為 RTU 模式,1 為 ASCII 模式。
b8 ~ b15:
通訊位址。
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1
b0
#38 H’41B6
╳ R/W
執行狀態
初始值:H’XXXX
-
-
-
-
-
手
搖
輪
輸
入
下
數
手
搖
輪
輸
入
上
數
-
行
程
暫
停
指
示
定
位
完
成
指
示
錯
誤
產
生
旗
號
C
P
值
溢
位
原
點
已
復
歸
反
向
脈
波
輸
出
中
正
向
脈
波
輸
出
中
執
行
狀
態
指
示
#39 H’41B7
╳ R 錯誤訊息代碼
請參考單元 6 之說明;初始值:H’0000
#40 H’41B8
╳ R/W
MFG
輸入電子齒
輪分子
請參考以下之說明;初始值:H’1
#41 H’41B9
╳ R/W
MFG
輸入電子齒
輪分母
請參考以下之說明;初始值:H’1
CR
編號
HW LW
通訊
位址
保
持
型
屬性
內容
設定範圍
#43 #42 H’41BA
╳ R/W 手搖輪輸入頻率
由手搖輪輸入的脈波頻率;初始值 0
#45 #44 H’41BC
╳ R/W 累計手搖輪輸入脈
波數
計數由手搖輪輸入的脈波個數,正轉脈波輸入,該計數值為“加”動作,
若為反轉脈波輸入,則該計數值為“減”動作。其中,計數值不受手搖輪
電子齒輪比(CR#40, #41)設定影響;初始值 0
設定值
回應速度
≧5
4ms (
初始值)
4
32ms
3
108ms
2
256ms
#46 H’41BE
╳ R/W 手搖輪輸入回應速
度
1
或 0
500ms
回應速度設定愈快,表示命令脈波輸出與
手搖輪脈波輸入時序越同步。
回應速度設定愈慢,表示命令脈波輸出反
應落後於手搖輪脈波輸入時序。
初始值:5
bit #
bit #
說
明
b0
b0
當 START 輸入為 On 時,b0 為 On
b1
b1
當 STOP 輸入為 On 時,b1 為 On
b2
b2
當 DOG 輸入為 On 時,b2 為 On
b3
b3
當 PG0 輸入為 On 時,b3 為 On
b4
b4
當 LSP 輸入為 On 時,b4 為 On
b5
b5
當 LSN 輸入為 On 時,b5 為 On
b6
b6
當 A 相輸入為 On 時,b6 為 On
#47 H’41BF
╳ R
端子狀態資訊
b7
b7
當 B 相輸入為 On 時,b7 為 On
#48 H’41C0
○
R
系統版本
系統版本指示,16 進位表示,例如:H’0100,表示軟體版本為 V1.00
*1
:設定單位依照 CR#5 參數設定之 b0, b1 單位系設定來變化
*2
:設定範圍對應的脈波轉換值,若大於脈波輸出最大範圍,則以最大脈波輸出。若小於脈波輸出最小範圍,則
以最小脈波輸出。
※ CR#0 ~ CR#48:對應之參數位址 H
’
4190 ~ H
’
41C0
可提供使用者利用 RS-485 通訊來讀寫資料。
1.
支援傳輸速度 4,800, 9,600, 19,200, 38,400, 57,600bps, 115,200bps。
2.
可使用 Modbus ASCII 模式/RTU 模式通訊協定,ASCII 模式資料格式固定為 7 位元、偶位元、1 stop 位 (7,
E, 1)
,RTU 模式資料格式固定為 8 位元、偶位元、1 stop 位 (8, E, 1)。:
3.
功能碼(Function):03
’
H
讀出暫存器資料。06
’
H
寫入一個 WORD 資料至暫存器。10
’
H
寫入多筆 WORD
資料至暫存器。
異常訊號及故障排除
當錯誤指示燈亮,表示 DVP01PU-S 發生硬體的故障或因錯誤的參數設定造成,錯誤訊息代碼記錄於 CR#39。
錯誤碼
說 明
錯誤碼
說 明
H’0000
無錯誤
H’0014
寸動 JOG 速度 (V
JOG
)
設定錯誤
H’0001
目標位置 (I) 設定錯誤
H’0020
正方向脈波禁止
H’0002
目標位置 (II) 設定錯誤
H’0021
反方向脈波禁止
H’0010
運行速度 (I) 設定錯誤
H’0030
低電壓訊號
H’0011
運行速度 (II) 設定錯誤
H’0080
內部記憶體發生硬體錯誤
H’0012
原點復歸減速速度 (V
CR
)
設定錯誤
H’0081
內部記憶體發生資料寫入錯誤
H’0013
原點復歸速度 (V
RT
)
設定錯誤
注意事項
本手册主要提供 DVP01PU-S 定位模块安装、配线回路及试机的参考,有关进一步的使用说明,请参考 DVP-PLC
应用技术手册
【特殊模块篇】。
请勿在上电时触摸任何端子。实施配线,务必关闭电源。
本机为开放型 (Open Type) 机壳,因此使用者使用本机时,必须将之安装于具防尘、防潮及免于电击/冲击意
外的外壳配线箱内。另必须具备保护措施 (如: 特殊的工具或钥匙才可打开) 防止非维护人员操作或意外冲击
本体,造成危险及损坏。
交流输入电源不可连接于输入/出信号端,否则将造成严重的损坏,请在上电之前再次确认电源配线。
產品簡介
说明及外围装置
DVP01PU-S
脉冲产生单元主要可应用于步进或伺服驱动系统的速度或位置控制,最高 200 kPPS 脉冲输出,内建
多种行程控制模式。透过 DVP-PLC SS/SA/SX/SC/SV 系列主机程序以指令 FROM/TO 来读写模块内的数据,模块
内具有 49 个 CR 寄存器,每个寄存器为 16 位。32 位数值参数由两个连续编号的 CR 所组成。
产品外观与各部介绍(
(
(
(指示灯、端子台)
)
)
)
上排端子
下排端子
S/S
A-
START
B+
STOP
B-
DOG
CLR+
LSP
CLR-
LSN
FP+
PG0+
FP-
PG0-
RP+
●
R P
FP
C L R
●
●
●
●
D
V
P
-0
1
P
U
ST AR T
PG 0
A
B
L S N
L SP
D OG
ST OP
ER R OR
L . V
s
s
PO W ER
3
.0
0
9
0
.0
0
3.00
25.20
60.00
3.40
1
2
3
14
4
5
6
8
10
3
7
9
12
11
13
15
16
尺寸单位:mm
A+
RP-
1.
电源、低电压及运行指示灯
9.
扩展机/扩展模块固定扣
2.
机种型号
10. DIN
轨糟 (35mm)
3. DIN
轨固定扣
11. RS-485
通讯口
4.
端子
12.
扩展机/扩展模块固定槽
5.
端子指示灯
13.
电源输入口
6.
扩展机/扩展模块定位孔
14.
扩展机/扩展模块连接口
7.
铭牌
17.
上排端子
8.
扩展机/扩展模块连接口
18.
下排端子
面板指示灯
POWER
:电源指示灯,内部 +5V 电源正常
START
:启动输入指示灯
LV
:低电压指示灯,外部电源输入小于
STOP
:停止输入指示灯
19.5V
,该指示灯亮
DOG
:近点信号输入指示灯
ERROR
:错误指示灯(On/Off 闪烁),当 CR#39
FP
:正转方向脉冲输出指示灯
错误编号不为零时动作
RP
:反转方向脉冲输出指示灯
LSP
:右极限输入指示灯
ΦA
:手摇轮 A 相脉冲输入指示灯
LSN
:左极限输入指示灯
ΦB
:手摇轮 B 相脉冲输入指示灯
PG0
:零点信号输入指示灯
CLR
:清除信号输出指示灯
简体中文
输入/输出端子信号
种 类
端 子
说 明
响应特性
电源输入供应 +24V, 0V,
输入电源, 24V DC (-15 ~ +20%),消耗电流 70±10mA,开机电流 1.3 A
-
START
启动输入
4ms/12ms
STOP
停止输入
4ms
LSP/LSN
右极限输入左极限输入
1ms
ΦA+
, ΦA- 手摇轮 A 相脉冲输入+, -(差分信号输入)
200kHz
ΦB+
, ΦB- 手摇轮 B 相脉冲输入+, -(差分信号输入)
200kHz
PG0+
, PG0- 零点信号输入+, -(差分信号输入)
4ms
DOG
依照运行模式不同有下列 2 种变化:
1.
原点回归时为近点信号。2.一段速或二段速插入启动信号
1ms
输入
S/S
输入点 (START, STOP, DOG, LSP, LSN) 信号共享端
-
CLR+
, CLR- 清除信号(Servo 驱动器内部偏差计数器清除信号)
4ms
FP+
, FP-
正/反转模式:正转方向脉冲输出;脉冲/方向:脉冲输出端;AB 相模式:A 相输出 200kHz
输出
RP+
, RP-
正/反转模式:反转方向脉冲输出;脉冲/方向:方向输出端;AB 相模式:B 相输出 200kHz
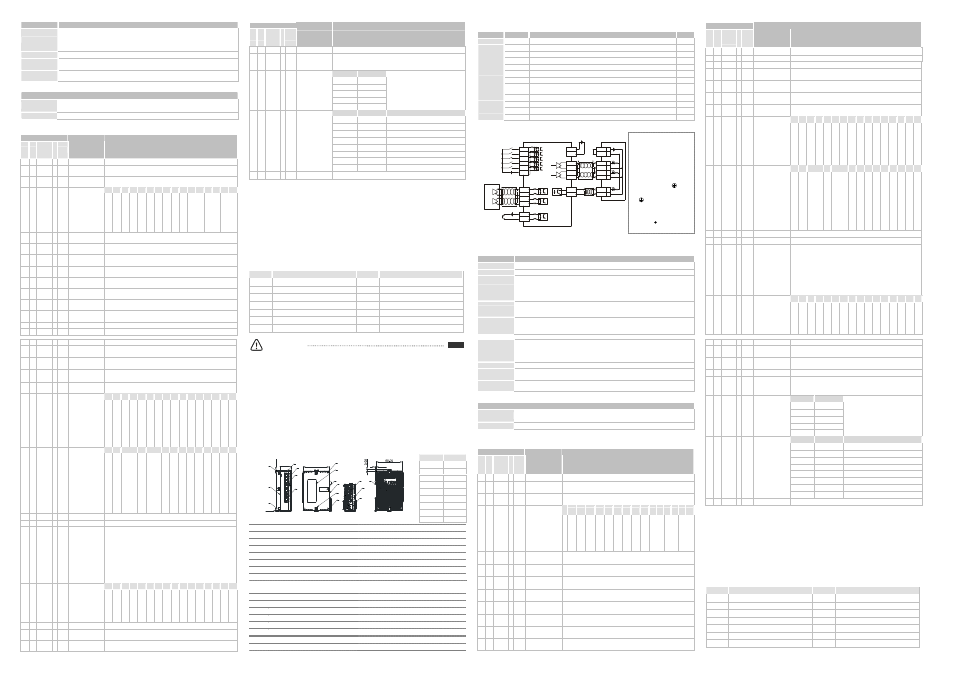
输入/输出回路配线
DVP01PU-S
START
STOP
LSP
LSN
DOG
S/S
+24V
5-24VDC
+24VDC
輸入
24V
0V
FP+
FP-
RP+
RP-
CLR+
CLR-
台達伺服 驅動器
隔離 線
手搖輪脈波
A
相
ΦA+
ΦA-
ΦB+
PG0+
PG0-
5-24VDC
PLS
/PLS
SIGN
/SIGN
DI2
COM-
ASD A 列
系
VDD
COM+
17
11
41
43
37
36
10
45
24V
B
相
ΦB-
1.
输出/入配线端请使用
22-16AWG (1.5mm)
单蕊祼
线或多蕊线。PLC 端子镙丝
扭力为 1.95 kg-cm (1.7lb-in)。
2.
在配线时请勿将输入点信号
线与输出点或电源等动力线
置于同一线糟内。
3.
请将电源模块的
端及
DVP01PU-S
定位控制模块的
端连接到系统接地点,再
将系统接点作第三种接地或
接到配电箱的机壳上。
4.
空端子 请勿配线。
5.
只能使用 60/75°C 的铜导线。
規格
功能规格
项 目
说 明
电源输入
24V DC
(-15% ~ +20%),消耗电流 70 ±10mA,开机电流 1.3 A
最大连接台(轴)数
8
台(轴);(不占任何 I/O 点数,SS/SA/SX/SC/SV 系列主机所能连接特殊扩展机台数总和为 8 台)
距离值
距离设定值由控制寄存器 (CR) 来设定,
1.
设定值:-2,147,483,648 ~ +2,147,483,647;
2.
单位可选择:um, mdeg, 10-4 inch, Pulse;
3.
可选择倍率:100, 101, 102, 103;
4.
可选择绝对位置或相对移动量
速度值
速度设定值由控制寄存器 (CR) 来设定,
1.
设定值:-2,147,483,648 ~ +2,147,483,647 (10 ~ 200kPPS 的脉冲转换值);
2.
单位可选择:Pulse/s, cm/min, 10deg/min, inch/min
外部输出点
全部采用光耦合作隔离,输出/入信号皆附 LED 作为信号及致能的指示
输出点:FP, RP 输出差分驱动信号 5V
输出点:CLR 为晶体管 NPN 开集极 5 ~ 24V DC, 20Ma 以下
外部输入点
全部采用光耦合作隔离,输出/入信号皆附 LED 作为信号及致能的指示
输入点:START, STOP, LSP, LSN, DOG 为接点或晶体管开集极 24V DC±10%, 5±1mA
输入点:ΦA, ΦB 为差分或晶体管开集极 5 ~ 24V DC, 6 ~ 15mA
输入点:PG0 为差分或晶体管开集极 5 ~ 24V DC, 6 ~ 15mA
脉冲输出方式
三种模式:Pulse/Dir, FP (CW)/RP (CCW), A/B;均采用差分输出
定位控制程序与
主机数据交换
主机使用 PLC 程序搭配 FROM/TO 指令来读取/写入 CR 的数据内容,如果数据内容为 32 位时,以 2
个 CR 处理,内建 16 位控制寄存器区 CR#0 ~ CR#48
与 DVP-PLC 主机
串接说明
模块编号以靠近主机顺序自动编号由 0 到 7,最大可连接 8 台,不占用数字 I/O 点数
其它规格
环 境 规 格
操作/储存环境
1.
操作:0
°C
~
55
°C
(温度),50 ~ 95%(湿度),污染等级 2
2. 储存:-25
°C
~
70
°C
(温度),5 ~ 95%(湿度)
耐振动/冲击
国际标准规范 IEC 61131-2, IEC 68-2-6 (TEST Fc) / IEC 61131-2 & IEC 68-2-27 (TEST Ea)
控制寄存器 CR
CR
编号
HW LW
通讯
地址
保
持
型
属性
内容
设定范围
#0 H’4190
○
R
机种型号
系统内定,只读;机种编码请参照机种型号列表 H’0110
#2 #1 H’4191
○
R/W
电机转一圈所需脉
冲数 A
设定范围 1 ~ +2,147,483,647 PPS/REV;初始值:2,000 脉冲数/转一圈
(PLS/REV)
#4 #3 H’4193
○
R/W
电机转一圈移动距
离 B
设定范围 1 ~ +2,147,483,647 unit/REV;初始值:1,000 (unit*1/REV)
b1
5
b14 b13 b12 b11 b10 b9
b8
b7
b6 b5 b4 b3 b2 b1 b0
#5 H’4195
○
R/W
参数设定
初始值:H’0000
S
T
O
P
输
入
极
性
S
T
A
R
T
输
入
极
性
S
T
A
R
T
响
应
时
间
加
速
曲
线
选
择
D
O
G
极
性
D
O
G
触
发
启
动
模
式
旋
转
方
向
原
点
回
归
方
向
L
S
N
输
入
极
性
L
S
P
输
入
极
性
脉
冲
输
出
方
式
位
置
数
据
倍
率
设
定
单
位
系
设
定
#7 #6 H’4196
○
R/W
最高速度 Vmax
设定范围 0 ~ +2,147,483,647 unit*1 (10 ~ 200 kPPS 的脉冲转换值) *2;
初始值:200,000 unit*1
#9 #8 H’4198
○
R/W
启动速度 Vbias
设定范围 0 ~ +2,147,483,647 unit*1 (0 ~ 200 kPPS 的脉冲转换值) *2;
初始值:0 unit*1
#11 #10 H’419A
○
R/W
寸动 JOG 速度 V
JOG
设定范围 0 ~ +2,147,483,647 unit*1 (10 ~ 200 kPPS 的脉冲转换值) *2;
初始值:5,000 unit*1
#13 #12 H’419C
○
R/W
原点回归速度 V
RT
设定范围 0 ~ +2,147,483,647 unit*1 (10 ~ 200 kPPS 的脉冲转换值) *2;
初始值:50,000 unit*1
#15 #14 H’419E
○
R/W
原点回归减速速度
V
CR
设定范围 0 ~ +2,147,483,647 unit*1 (10 ~ 200 kPPS 的脉冲转换值) *2;
初始值:1,000 unit*1
#16 H’41A0
○
R/W
原点回归的零点
(PG0)
信号数 N
设定范围 0 ~ +32,767 PLS;初始值:0 PLS
#17 H’41A1
○
R/W
原点回归的脉冲信
号数 P
设定范围 -32,768 ~ +32,767 PLS;初始值:0 PLS
#18 H’41A2
○
R/W
原点回归模 H
MODE
b0
:原点回归模式,b1:原点回归 DOG 下降缘检测
CR
编号
HW LW
通讯
地址
保
持
型
属性
内容
设定范围
#20 #19 H’41A3
○
R/W
原点位置定义 HP
设定范围 0 ~ ±999,999 unit*1;初始值:0 unit*1
#21 H’41A5
○
R/W
加速时间 Tacc
设定范围 10 ~ +32,767 ms;初始值:100 ms
#22 H’41A6
○
R/W
减速时间 Tdec
设定范围 10 ~ +32,767 ms;初始值:100 ms
#24 #23 H’41A7
╳ R/W 目标位置(I) P(I)
设定范围 -2,147,483,648 ~ +2,147,483,647 unit*1 (-2,147,483,648 ~
+2,147,483,647
脉冲转换值) *2;初始值:0 unit*1
#26 #25 H’41A9
╳ R/W 运转速度(I) V(I)
设定范围 -2,147,483,648 ~ +2,147,483,647 unit*1 (10 ~ 200 kPPS 的脉冲转
换值) *2;初始值:1,000 unit*1
#28 #27 H’41AB
╳ R/W 目标位置(II) P(II)
设定范围 -2,147,483,648 ~ +2,147,483,647 unit*1 (-2,147,483,648 ~
+2,147,483,647
脉冲转换值) *2;初始值:0 unit*1
#30 #29 H’41AD
╳ R/W 运转速度(II) V(II)
设定范围 0 ~ +2,147,483,647 unit*1 (10 ~ 200 kPPS 的脉冲转换值) *2;
初始值:2,000 unit*1
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
#31 H’41AF
╳ R/W
运转命令
初始值:H’0000
-
-
C
L
R
输
出
O
n
/O
ff
控
制
C
L
R
信
号
输
出
模
式
-
现
在
位
置
归
零
-
软
件
S
T
A
R
T
绝
对
/相
对
坐
标
设
定
原
点
回
归
启
动
JO
G
-
运
转
JO
G
+
运
转
反
方
向
脉
冲
停
正
方
向
脉
冲
停
软
件
S
T
O
P
错
误
重
置
b15 b14
b13
b12 b11~
b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
#32 H’41B0
╳ R/W
工作模式
初始值:H’0001
-
-
现
在
位
置
C
R
3
4
, 3
3
,
现
在
速
度
C
R
3
6
, 3
5
显
示
单
位
(0
p
u
ls
e,
1
u
n
it)
回
归
出
厂
设
定
M
A
S
K
选
择
设
定
L
S
P
/L
S
N
停
止
模
式
手
摇
轮
M
P
G
范
围
限
制
S
T
O
P
模
式
手
摇
轮
M
P
G
输
入
操
作
变
速
度
运
转
模
式
启
动
插
入
二
段
速
定
位
运
动
模
式
启
动
连
续
两
段
速
定
位
运
动
模
式
启
动
插
入
单
段
速
定
位
运
动
模
式
启
动
单
段
速
定
位
运
动
模
式
启
动
#34 #33 H’41B1
╳ R/W 现在位置 CP(PLS) 显示范围:-2,147,483,648~+2,147,483,647 PLS;初始值:0 PLS
#36 #35 H’41B3
╳ R/W 现在速度 CS(PPS) 显示范围:0 ~ +2,147,483,647 PPS;初始值:0 PPS
#37 H’41B5
○
R/W
通讯地址及速率
(Baud Rate)
设定
设定 RS-485 通讯地址,设定范围 01 ~ 254。出厂设定值为 K1。
设定通讯速率,共有 4,800, 9,600, 19,200bps, 38,400 bps, 57,600 bps, 115,200
bps
六种。ASCII 模式数据格式固定为 7Bit、偶位、1 stop bit ( 7 E 1),RTU
模式数据格式固定为 8Bit、偶位、1 stop bit ( 8 E 1)。
b0: 4,800 bps
(位/秒)。 b1: 9,600 bps(位/秒)。(出厂设定值)
b2: 19,200 bps
(位/秒)。 b3: 38,400 bps(位/秒)。
b4: 57,600 bps
(位/秒)。 b5: 115,200 bps(位/秒)。
b6
: 保留。
b7: 0 为 RTU 模式,1 为 ASCII 模式。
b8
~ b15: 通讯地址。
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
#38 H’41B6
╳ R
执行状态
初始值:H’XXXX -
-
-
-
-
手
摇
轮
输
入
下
数
手
摇
轮
输
入
上
数
-
行
程
暂
停
指
示
定
位
完
成
指
示
错
误
产
生
旗
号
C
P
值
溢
位
原
点
已
回
归
反
向
脉
冲
输
出
中
正
向
脉
冲
输
出
中
执
行
状
态
指
示
#39 H’41B7
╳ R
错误信息代码
请参考单元 6 的说明;初始值:H’0000
#40 H’41B8
╳ R/W
MFG
输入电子齿
轮分子
请参考以下的说明;初始值:H’1
#41 H’41B9
╳ R/W
MFG
输入电子齿
轮分母
请参考以下的说明;初始值:H’1
#43 #42 H’41BA
╳ R/W 手摇轮输入频率
由手摇轮输入的脉冲频率;初始值 0
#45 #44 H’41BC
╳ R/W
累计手摇轮输入脉
冲数
计数由手摇轮输入的脉冲个数,正转脉冲输入,该计数值为“加”动作,
若为反转脉冲输入,则该计数值为“减”动作。其中,计数值不受手摇轮
电子齿轮比(CR#40, #41)设定影响;初始值 0
设定值
响应速度
≧5
4ms (
初始值)
4
32ms
3
108ms
2
256ms
#46 H’41BE
╳ R/W
手摇轮输入响应速
度
1
或 0
500ms
响应速度设定愈快,表示命令脉冲输出与
手摇轮脉冲输入时序越同步。
响应速度设定愈慢,表示命令脉冲输出反
应落后于手摇轮脉冲输入时序。
初始值:5
bit #
bit #
说
明
b0
b0
当 START 输入为 On 时,b0 为 On
b1
b1
当 STOP 输入为 On 时,b1 为 On
b2
b2
当 DOG 输入为 On 时,b2 为 On
b3
b3
当 PG0 输入为 On 时,b3 为 On
b4
b4
当 LSP 输入为 On 时,b4 为 On
b5
b5
当 LSN 输入为 On 时,b5 为 On
b6
b6
当 A 相输入为 On 时,b6 为 On
#47 H’41BF
╳ R
端子状态信息
b7
b7
当 B 相输入为 On 时,b7 为 On
#48 H’41C0
○
R
系统版本
系统版本指示,16 进位表示,例如:H’0100,表示软件版本为 V1.00
*1
:设定单位依照 CR#5 参数设定的 b0, b1 单位系设定来变化
*2
:设定范围对应的脉冲转换值,若大于脉冲输出最大范围,则以最大脉冲输出。若小于脉冲输出最小范围,则
以最小脉冲输出。
※ CR#0 ~ CR#48:对应的参数地址 H
’
4190 ~ H
’
41C0
可提供使用者利用 RS-485 通讯来读写数据。
1.
支持传输速度 4,800, 9,600, 19,200, 38,400, 57,600bps, 115,200bps。
2.
可使用 Modbus ASCII 模式/RTU 模式通讯协议,ASCII 模式数据格式固定为 7 位、偶位、1 stop 位 (7, E, 1),
RTU
模式数据格式固定为 8 位、偶位、1 stop 位 (8, E, 1)。:
3.
功能码(Function):03
’
H
读出寄存器数据。06
’
H
写入一个 WORD 数据至寄存器。10
’
H
写入多笔 WORD
数据至寄存器。
異常信號及故障排除
当错误指示灯亮,表示 DVP01PU-S 发生硬件的故障或因错误的参数设定造成,错误信息代码记录于 CR#39。
错误码
说 明
错误码
说 明
H’0000
无错误
H’0014
寸动 JOG 速度 (V
JOG
)
设定错误
H’0001
目标位置 (I) 设定错误
H’0020
正方向脉冲禁止
H’0002
目标位置 (II) 设定错误
H’0021
反方向脉冲禁止
H’0010
运行速度 (I) 设定错误
H’0030
低电压讯号
H’0011
运行速度 (II) 设定错误
H’0080
内部存储器发生硬件错误
H’0012
原点回归减速速度 (V
CR
)
设定错误
H’0081
内部存储器发生数据写入错误
H’0013
原点回归速度 (V
RT
)
设定错误