Using the machine – Kemppi Pulse TCS User Manual
Page 14
EN
3.
USING THE MACHINE
3.1
CONTROL FROM THE ROBOT
The welding parameter control can be handled either from the robot control unit or from the
welding machine's own K 60 control panel or using the K 62 remote control panel. However,
there are some settings, such as Wise functions, memory channel settings and the machine
configurations, which cannot be changed remotely.
In normal everyday usage, it is the welding robot that controls the welding parameters.
KempArc power sources are compatible with several communication protocols used by
various robot brands.
Supported protocols:
CANopen, Modbus, Profibus, Interbus (myös optinen), Ethernet, DeviceNet
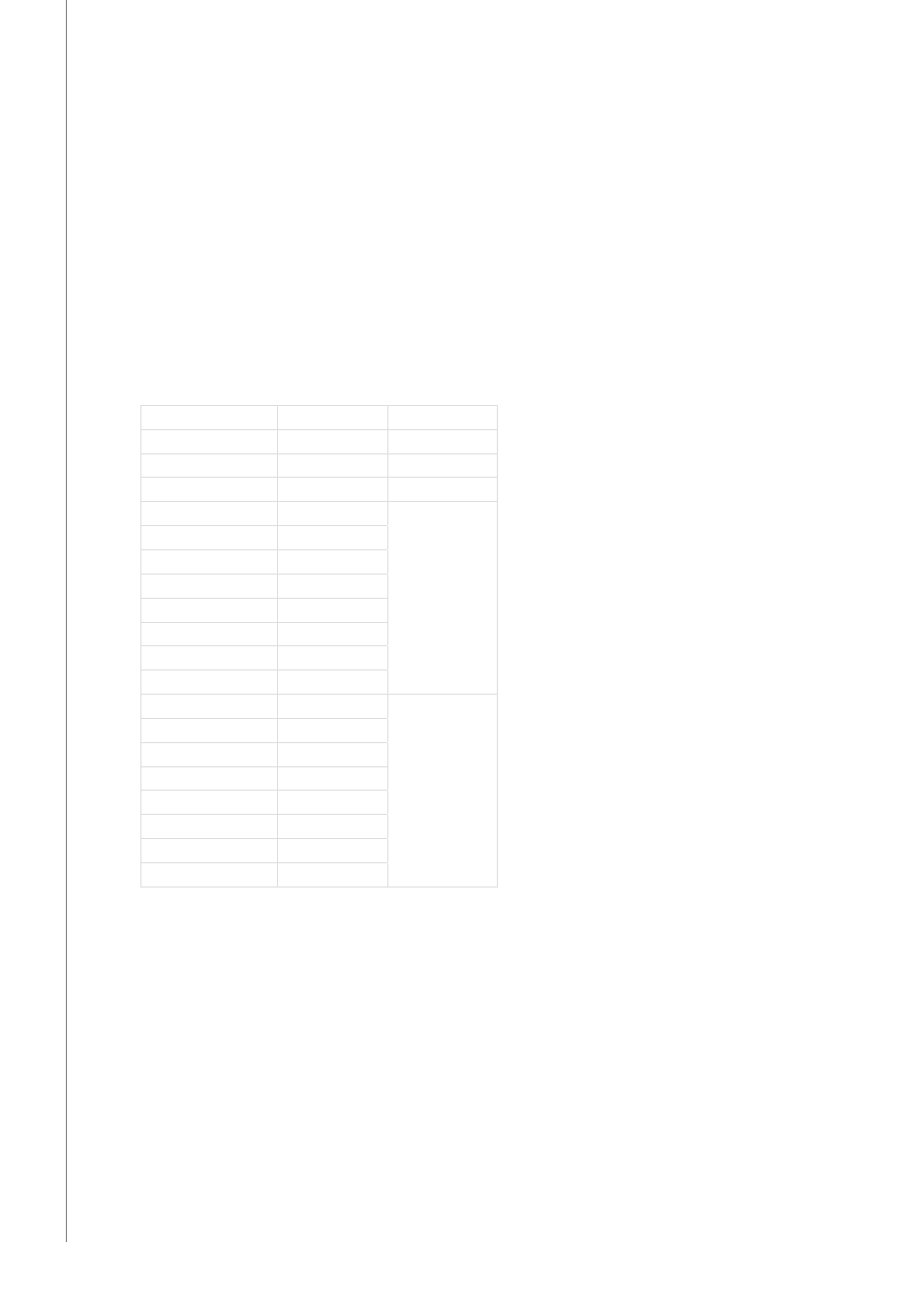
Below you can see a typical data package used for controlling the welding machine. The
content of the package varies according to the robot brand.
WireFeedSpeed
Word
Byte0, Byte1
Voltage/Trim
Word
Byte2, Byte3
MemoryChannel
Byte
Byte4
Dynamics
Byte
Byte5
Start
Bit0
Byte6
Not In Use
Bit1
WireInch
Bit2
WireRetract
Bit3
GasPurge
Bit4
Not In Use
Bit5
Touch Sensing
Bit6
OnLine
Bit7
FieldBusCheck
Bit0
Byte7
ErrorReset
Bit1
Not In Use
Bit2
Not In Use
Bit3
Not In Use
Bit4
ExtOut1
Bit5
ExtOut2
Bit6
ExtOut3
Bit7
12
KempA
rc P
ulse
TCS / © Kemppi O
y / 1204